
¶ 1. General Information
¶ 1.1 Scope
The VATITA Air Traffic Control Training Manual is a comprehensive resource designed to provide aspiring virtual air traffic controllers with the knowledge, skills, and procedures necessary to operate effectively within VATSIM Italy’s (VATITA) virtual airspace. This manual covers a wide range of topics, encompassing both foundational principles and advanced techniques relevant to the role of air traffic control.
This manual serves as a foundational resource for individuals undergoing air traffic control training within VATITA. While it covers a broad range of topics, it is not exhaustive, and controllers are encouraged to seek additional resources and mentorship to further enhance their skills and knowledge.
By studying the contents of this manual and applying its principles in practice, aspiring controllers will develop the competence and confidence that we think are necessary to provide safe, efficient, and professional air traffic services within VATSIM Italy’s virtual airspace. We remind you that it’s very important to always treat other people with respect and to know what is and isn’t allowed on VATSIM.
You can find all relevant information on the VATSIM Code Of Conduct.
If you wish to enrich your knowledge, you may consider the following documents.
¶ 1.2 Applicability
The standards contained in this manual are applicable to all VATITA ATCs and visitors, waivers to these procedures shall be asked through the VATITA training email address: training@vatita.net
¶ 1.3 Duties & Responsibility
An air traffic controller is a person licensed to provide air traffic control services in respect of an airspace where the provision of such services is subject to Community legislation.
An air traffic controller may be an aerodrome control, approach control or area control controller, or a combination thereof. An air traffic controller is responsible for providing air traffic control services. the purpose of air traffic control services is to:
- prevent collisions between aircrafts
- prevent collisions between aircrafts or objects on the maneuvering area
- maintain a safe, orderly and expeditious flow of traffic
- give warnings and useful information for a safe and efficient conduct of the flight
¶ 2. VATSIM REGULATIONS
¶ 2.1 Overview of ATC positions
On VATSIM it is possible to open several ATC positions, the list can be found in the Global Controller Administration Policy (GCAP) Chapter 4. “Air Traffic Controller Ratings and Positions”. You can find the GCAP here.
On VATSIM the Top Down Principle is used: If Tower is not online, Approach will provide Tower services for that airport and so on.
Each position has a limit in terms of visibility range this is listed in article C8 of the Code Of Conduct and has to be respected when connecting.
¶ 2.2 Code of conduct
The Code Of Conduct describes several rules that members must follow at all times. The primary goals of VATSIM are to educate, to provide a realistic simulation of flying and air traffic control and, most importantly, to provide a fun environment for everyone to enjoy our hobby. Here are some of the most important rules:
- A1 Courtesy and Respect: Treat all members with respect, fostering a positive and collaborative atmosphere.
- A10 Patience and Tolerance: We all learn at our own pace. Be patient with those who are new and offer support when needed.
- C1 Controllers who are new to VATSIM, or are otherwise unfamiliar with an airspace shall educate themselves by first observing operations and/or studying procedures used in that location.
- C6 Only approved positions and their corresponding frequencies may be opened by controllers. Controllers may only open a position they are authorized to, in accordance with global and local policy.
¶ 2.3 Calling a Supervisor
VATSIM does not care to engage in the constant policing of its account holders. If a problem arises online between two or more account holders that:
- cannot be resolved quickly by the parties involved
- affects the use of VATSIM by other account holders
- could affect the operation of the network
The parties involved should check to see if a supervisor or administrator is online to help resolve the issue. Examples of situations where a supervisor should be called:
- insults or other disrespectful behavior (see A1 of the Code of Conduct)
- pilot interfering with other traffic AND not responding to your messages for several minutes.
If a pilot on the ground at a gate/stand or enroute does not respond to your requests, you may (but are not obliged to) call a supervisor, but wait at least 10-15 minutes have elapsed from the time you first attempted to contact him/her. Unless of course, it is affecting other traffic or the operation of the network.
When contacting a supervisor using the command “.wallop” in Euroscope add as much details and context to your request as possible in your first message.
For example:
“The pilot with callsign ABC123 has been flying through my airspace since 15 minutes, I first contacted him at time xxxxZ, he has not replied since.”
or
“The pilot with callsign ABC123 is connected on the runway at the airport of LIMC and does not reply to my messages”.
¶ 2.4 VATITA Regulations
VATITA has several local regulations such as the VATITA Constitution, the ATC Training Policy, the Standard Operating Procedures (SOPs) and the Letters of Agreement (LoA), which can be found on the website www.vatita.net these must be followed at all times. The staff of VATITA is responsible for the moderation of its online channels (Discord, Teamspeak), for the ATC Roster (list of controllers allowed to open specific ATC positions), as well as for the list of ATC positions to be opened during online events.
For all other disciplinary matters when connected as pilot or ATC on VATSIM, you must refer to a supervisor, see Chapter 2.3.
¶ 3. TRAINING
¶ 3.1 How training works
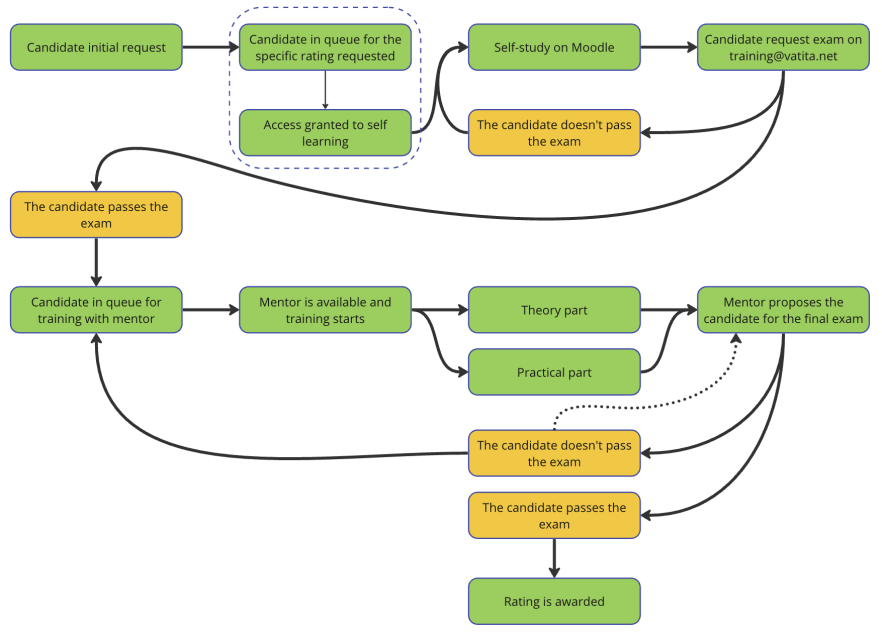
The training to become an ATCO and therefore be allowed to cover any position, is initiated with a request from the candidate through the Training Center.
Each training course consists of a theoretical part and a practical part (simulation and online). In the S1 course, the practical part is carried out using simulations only.
A list of ratings available and a description of the requirements for them can be found on the Global Controller Administration Policy.
Once the candidate submits the request, the candidate joins the queue for the specific rating requeste.
The candidate is expected to use this manual as a self-study reference prior to the start of the training in order to reduce the length of the training itself. Candidates who are not prepared for the material published in this manual and its references may be refused or have their training interrupted. This knowledge can be assessed before and during the course.
Whenever the candidate feels ready, he/she must request to take the VATITA S1 Entry Exam via the discord ticket system.
Failing to do so will lead to your training request being closed.
The staff will give access to the VATITA S1 Theoretical Exam on the VATEUD Core (core.vateud.net), according to the order on the waiting list or as appropriate. The candidate is limited to one attempt at the exam per month. If the test is passed, he/she will be placed in the queue for the training sessions run by the mentors. If the exam is failed twice, the request is suspended for 6 months.
Within 48h from the end of each lesson, the candidate will receive a feedback sheet from the mentor containing a report on the progress, including any skill or knowledge gap that the candidate is required to fill in order to obtain the rating. The candidate is evaluated in each competency with a grade from 1 (needs attention) to 4 (mastered) and a comment is added where appropriate. Indicatively, when all the competencies are evaluated between 3 and 4, then the candidate is deemed ready for the practical exam.
Once the mentor assesses that the trainee possesses the required knowledge to attempt the final VATEUD theoretical exam, the mentor requests the exam through the training center to the ATC TD staff. The final VATEUD theoretical exam takes place on core.vateud.net.
¶ For the rating S1
After passing the final VATEUD theoretical exam, the trainee will be awarded an S1 rating which will allow the trainee to open every unrestricted GND and DEL position in Italy on VATSIM.
Training for tier 1 airports can be requested according to the modes described in the training policy.
¶ For other ratings
After passing the final VATEUD theoretical exam, the mentor, in coordination with the Training Director may issue, at his/her discretion, a solo endorsement, allowing the controller to independently operate a specific Position (or smaller parts of that position) one rating above their current. The solo endorsement expires after 1 month and can be renewed for a maximum of 3 times, allowing the student to operate the position for a maximum of 3 months in total.
Once the mentor assesses that the trainee possesses the required knowledge to attempt the practical exam, the mentor organizes the exam. The exam is carried out online at the presence of two examiners. Ideally, the mentor should not examine his/her trainee.
The same process applies for all ratings. For all ratings, where underlying positions require an endorsement, a top-down controller does need to hold that endorsement.
¶ 4. AIR TRAFFIC MANAGEMENT
¶ 4.1 Altimetry
Aircraft pressure altimeters indicate the elevation of the aircraft above a defined datum. The datum selected depends on the barometric pressure set on the altimeter subscale. Sound altimeter setting procedures are an essential tool in ensuring safe separation from the ground and from other aircraft. The SI or metric unit of measurement for barometric pressure is the hectopascal (hPa) and this is adopted in respect of altimeter pressure settings in ICAO Annex 5.
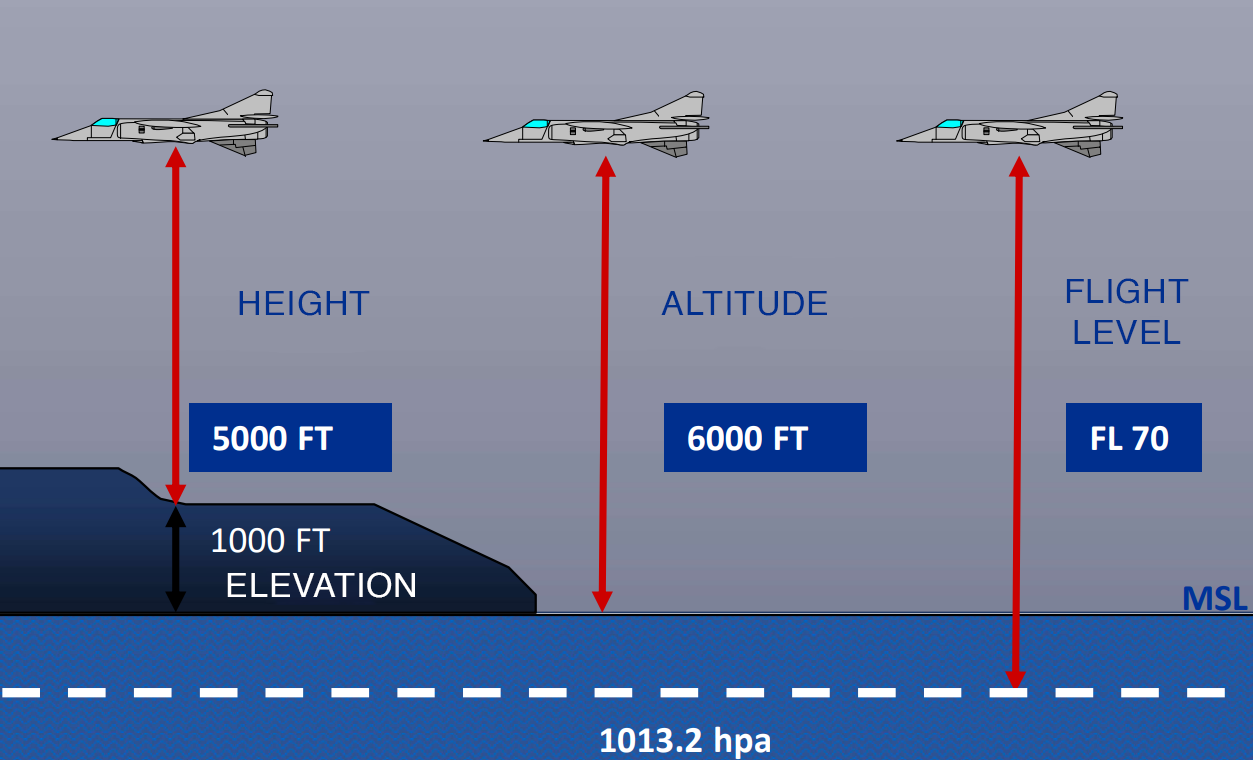
QNH - The pressure set on the subscale of the altimeter so that the instrument indicates its height above sea level. The altimeter will read runway elevation when the aircraft is on the runway. The purpose of the QNH is to provide a precise and reliable measurement of the height of the aircraft from both the ground and other aircraft flying in the area. The QNH in fact changes with the pressure of the air (weather dependent). By using the QNH that is local to where the aircraft is flying, there is assurance that given an instruction to an aircraft to fly at 3’000ft and to another aircraft to fly at 4’000ft, both will be exactly and unequivocally at the respectively given altitudes.
With Standard Pressure (1013.2 mb) set, an aircraft altimeter indicates Pressure Altitude (Flight Level), and is used by all aircraft operating above the transition altitude to provide a common datum for vertical measurement. The main reason why a local QNH is not used above the transition altitude is mainly practical: the local QNH varies between locations, even close to each other. Aircraft above the transition level are or are approaching their cruise level, therefore they don’t need to care about obstacles on the ground but only the separation with other traffic, therefore a “standard” (fixed by convention) value is used just to assure that all traffic can respect the instructions given by ATCs regarding their altitude.
Transition Altitude (TA), is the altitude at which an aircraft in ascending flight changes its altimeter from QNH to standard.
Transition Level (TL) is the lowest usable flight level above the Transition Altitude. Aircraft in descending flight will change their altimeter from Standard to QNH when crossing the TL.
No traffic is allowed to remain in the range within the Transition Altitude and the Transition Level values.
Depending on the air pressure, the transition level is chosen so that there is always at least 1000 ft between Transition Level TL and Transition Altitude TA. This is called “Transition layer” and it’s not usable by the Air Traffic Controller.
![]()
¶ 4.2 Airspace Structure
Airspaces are designated regions of airspace that are managed and regulated to ensure the safe and efficient flow of air traffic. Each airspace is defined by specific rules, regulations, and requirements that govern the movement of aircraft within its boundaries. Understanding how airspaces work is essential for pilots and air traffic controllers alike to ensure safe and orderly flight operations.
¶ 4.2.1 Types of Airspace
-
Controlled Airspace: Controlled airspace is managed by air traffic control (ATC) services. It includes Class A, B, C, D, and E airspace. Within controlled airspace, pilots must communicate with ATC and adhere to specific clearance and separation requirements.
-
Uncontrolled Airspace: Uncontrolled airspace, also known as Class F and G airspace, does not have ATC services. Pilots are responsible for maintaining separation from other aircraft and adhering to flight rules regulations. Generally, the controller can only give suggestions and cannot force pilots to comply. The phrase “at your own discretion” should be used with most instructions.
-
Regulated Airspace (TSA): Special use airspace includes areas such as restricted airspace, prohibited airspace, military operations areas (MOAs), and temporary flight restrictions (TFRs). These areas have specific restrictions and requirements for aircraft entry.
¶ 4.2.2 Airspace Classification
ATS airspace is classified and designated in accordance with the following table:
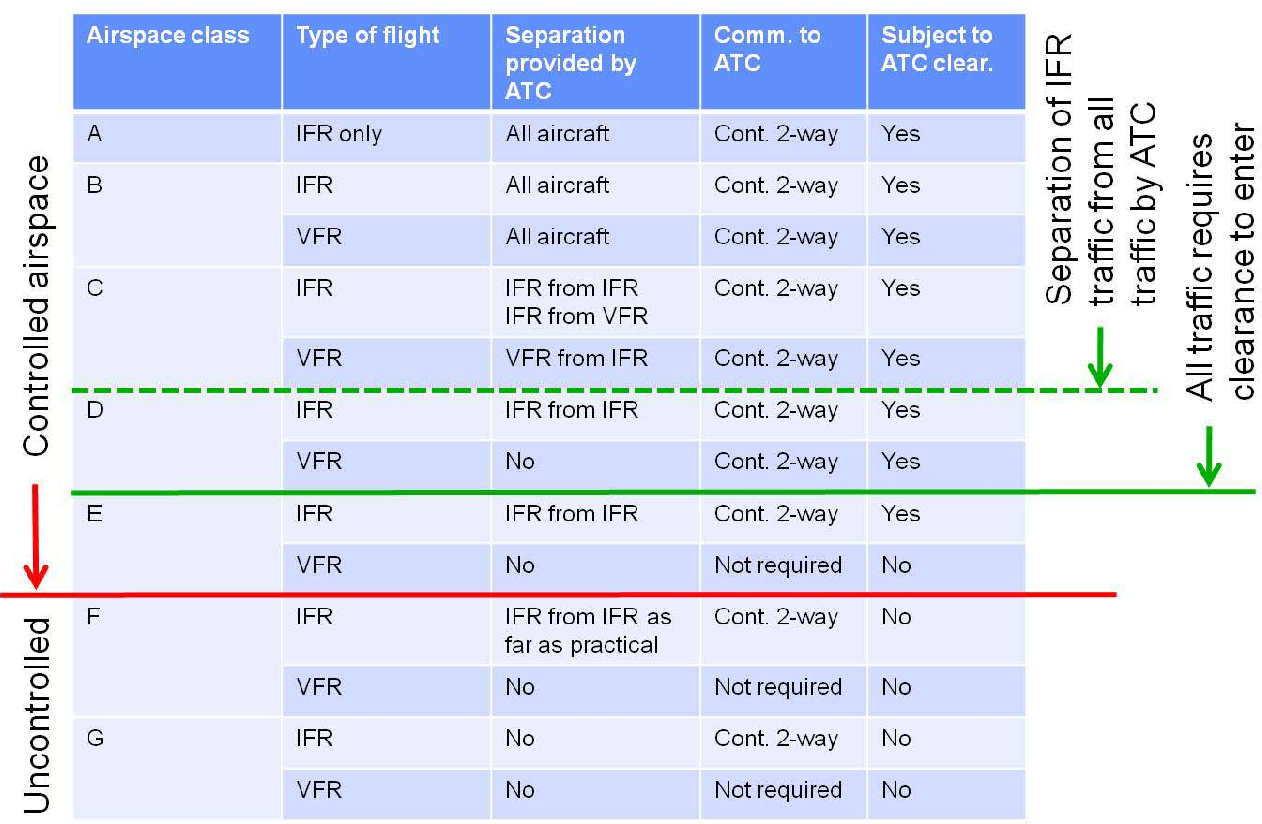
Speed restriction: 250 KIAS or less below FL100 is applicable in airspaces C and lower.
¶ 4.2.3 Regulated Airspace
¶ 4.2.3.1 Prohibited Areas
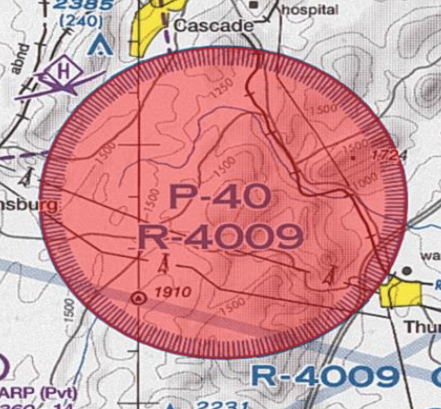
A prohibited area is an airspace of defined dimensions, above the land area or territorial waters of a state, within which the flight of aircraft is prohibited. The vertical and lateral dimensions of prohibited areas are published in the national AIP ITALIA, together with the hours of operation where applicable.
¶ 4.2.3.2 Dangerous Areas
A danger area is an airspace of defined dimensions within which activities dangerous to the flight of aircraft may exist at specified times.
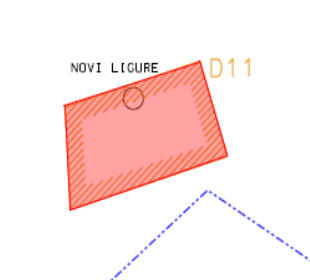
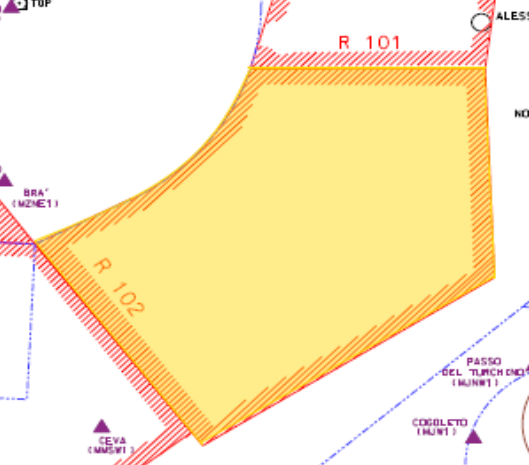
¶ 4.2.3.3 Restricted Areas
A restricted area is an airspace of defined dimensions above the land areas or territorial waters of a State, within which the flight of aircraft is restricted in accordance with specific conditions. ATC may clear a flight to enter or cross a restricted area.
Note: If a pilot overflies any of these regulated areas, the controller may notify them but should not call a SUP or file a report, as these areas are not simulated on VATSIM.
¶ 4.2.4 RVSM Airspace
Reduced vertical separation minima (RVSM) is the reduction, from 2,000 feet to 1,000 feet, of the standard vertical separation required between aircraft flying between FL290 and FL410. Only aircraft with specially certified altimeters and autopilots may fly in RVSM airspace; otherwise, the aircraft must fly lower or higher than the airspace, or seek special exemption from the requirements.
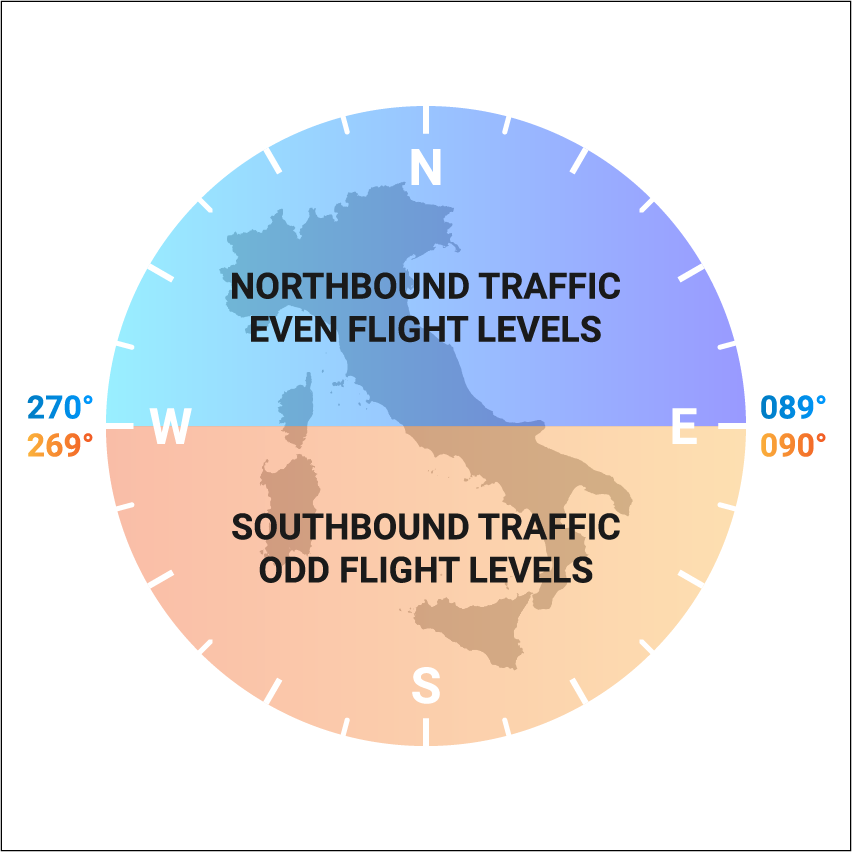
Cruising levels within European RVSM airspace are organized in accordance with the Table of Cruising Levels contained in ICAO Annex 2, Appendix 3a). Within the Italian airspace, to accommodate predominant traffic directions, the following differences with regard to track are applied:
- From 090 degrees to 269 degrees instead of from 000 degrees to 179 degrees (southbound = ODD FLs)
- From 270 degrees to 089 degrees instead of from 180 degrees to 359 degrees (northbound = EVEN FLs)
¶ 4.3 FLIGHT RULES
¶ 4.3.1 VFR
¶ 4.3.1.1 General Information
Visual Flight Rules (VFR) are a set of regulations under which a pilot operates an aircraft in weather conditions generally clear enough to allow the pilot to see where the aircraft is going. In VFR conditions, pilots rely primarily on external visual cues such as landmarks, roads, and bodies of water to navigate, rather than relying solely on instruments in the cockpit.
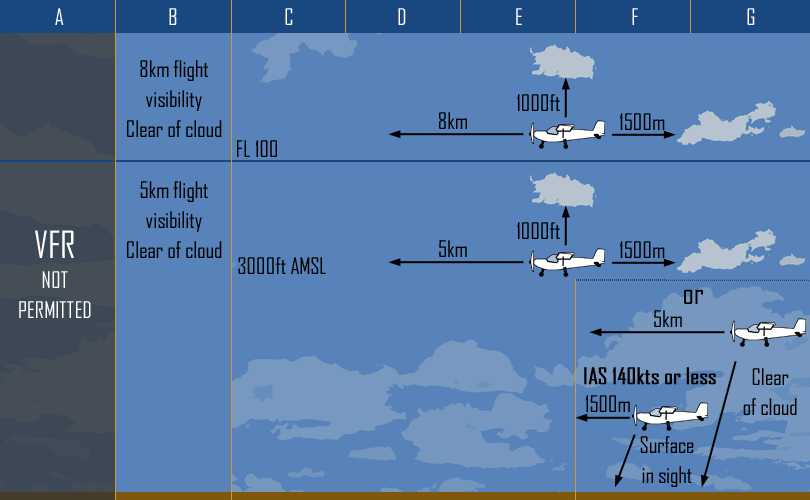
¶ 4.3.1.2 Visual Meteorological Conditions (VMC)
VMC stands for Visual Meteorological Conditions. These are weather conditions that allow pilots to operate under Visual Flight Rules (VFR), meaning they can navigate and maintain safe separation from other aircraft primarily by visual reference to the ground or water.
In VMC, visibility is generally good, and clouds are not a limiting factor for flight. The key characteristics of VMC include:
- Visibility
- Cloud clearance
- Weather conditions
The minimum requirements for VMC vary depending on the class of airspace, altitude, and airspeed. Below you can find a table of VMC:
¶ 4.3.1.3 Special VFR
Special VFR is a subcategory of Visual Flight Rules (VFR) flight. Permission to operate under Special VFR within a Control Zone, in meteorological conditions not meeting Visual Meteorological Conditions (VMC) minima, is given to a flight by means of an Air Traffic Control clearance. Such traffic is effectively also Controlled VFR. Such special VFR flights may be conducted during the day only, an exception is made for helicopters (RAIT.5010). An air traffic control unit shall not issue a special VFR clearance to aircraft to take off or land at an aerodrome within a control zone, or enter the aerodrome traffic zone or aerodrome traffic circuit when the reported meteorological conditions at that aerodrome are below the following minima:
- The ground visibility is less than 1 500 m or, for helicopters, less than 800 m;
- The ceiling is less than 180 m (600 ft).
- The pilot can’t maintain a speed of 140 KIAS or less
Pilots requesting to operate under Special VFR conditions, will need to wait in VMC for approval by the Approach Controller. If the facility is not online, the TWR controller may issue the clearance to enter the control zone.
Special VFR traffic shall be separated from all traffic according to local SOPs.
¶ 4.3.1.4 Night VFR
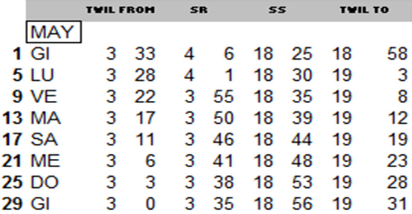
Night VFR is simply a VFR flight conducted after twilight (TWIL TO). NVFR flights must have a flight plan and they must usually be operated to/from airports which are NVFR approved. You can find a table with all the times in AIP ITALIA - GEN 2.7
Note: On VATSIM, VFR flights may be flying using daylight even though it’s night. Usually the pilot adds a comment in the remarks section stating that they are flying Daylight. It is a good practice to always ask the pilot whether they are by day or by night. The pilot can also indicate “clear skyes” if ignoring real life bad weather. In case of doubt is it worth it for the controller to clarify in private chat what the pilot is currently simulating.
¶ 4.3.2 IFR
¶ 4.3.2.1 General Information
Instrument Flight Rules (IFR) are rules which allow properly equipped aircraft to be flown under instrument meteorological conditions (IMC). Instrument meteorological conditions (IMC) are meteorological conditions expressed in terms of visibility, distance from cloud, and ceiling, less than the minima specified for visual meteorological conditions (VMC). IFR Flights are flown using predetermined waypoints that are defined by geographic coordinates or their bearing and distance from a beacon, and by a name, which typically takes the form of a five-letter capitalized word. For example EMDUD, MEBUR, GILIO, EKPAL.
¶ 4.4 FPL
A Flight plan is a document which provides specific information to air traffic service units relative to an intended flight or portion of a flight of an aircraft. Generally it includes information such as departure and arrival, estimated time en route, alternate airports, flight rule(s), characteristics and equipment of the aircraft. On Euroscope, depending on the plugin you are using, you will see a different flight plan window:
- If using the default Euroscope radar plugin, you may refer to this document: https://www.euroscope.hu/wp/flight-plan-setting-dialog/
- If using Topsky, you may refer to this document: Topsky/Documentation/Controller/Setup A —> TopSky plugin for Euroscope - General - A —> Chapter 7.7 Flight Plan Window
Information on aircraft type, wake turbulence category and communication, navigation and identification (transponder) equipment is part of the flight plan.
More information can be found at: Flight plan completion
¶ 4.4.1 VFR
The following items should be checked in a VFR flight plan:
- A valid departure and destination ICAO code
- Adherence with the selected flight Rules (VFR or IFR) in all fields of the flight plan
- VFR routes including ATZ and CTR VRPs, unless performing VFR CIRCUITS
- Correct cruise altitude for the flight rules selected and in accordance of the Italian’s semicircular rules
- Check if there is any remarks useful for being considered
If everything is correct, the controller can issue a clearance and enable the pilot to proceed with further needed departure steps. It is important to note that all VFR waypoints are valid as long as the pilot can identify them: a highway, a railway or a small town are all valid waypoints.
Note: VFR traffic may start-up at their discretion unless cited in the SOPs.
¶ 4.4.1.1 Abbreviated
An abbreviated flight plan is used to fly an aircraft through portions of controlled airspace without a flight plan. In case the traffic wants to open an abbreviated flight plan, you need to gather the following information:
- Callsign
- Aircraft Type
- Departure and Destination
- Route
- Persons on board [essential]
[Facility] I-CRAB, stand 401, info A, request to open an abbreviated flight plan
I-CRAB, [Facility] [if no ATIS available, give weather information info by voice], ready to copy
I-CRAB, [QNH], is a C150, [DEP] [DEST], 2 persons on board, exiting via PES3 at 1500 ft, is ready for taxi
I-CRAB, roger, taxi to holding point Alpha, RWY 12, via TV, T
¶ 4.4.2 IFR
For Instrument Flight Rules (IFR) flights, air traffic control relies on flight plans to establish air traffic control services. There are three main types of aircraft routing used in IFR flight plans: Airway, Navaid, and Direct. A route may comprise segments of different routing types. Airway routing follows predefined pathways known as Airways, typically required for aircraft between departure and destination airports. Regulations govern altitude, airspeed, and procedures for entering and exiting airways (such as Standard Instrument Departures and Standard Terminal Arrival Routes). Airways are identified by alphanumeric codes like “N851” or “UY762”. Navaid routing links Navigational Aids (such as VOR or NDB) that may not be directly connected by airways. It’s utilized for IFR aircraft without GPS receivers, as they can’t navigate via waypoints. The different type of Navaids are described here.
¶ 4.4.3 Yankee & Zulu
A Yankee flight plan is simply a flight plan that departs with IFR rules and then cancels and continues as VFR.
The following items should be checked in a the flight plan:
- A correct departure and destination
- Flight Rules
- IFR route until the first VFR point
- Altitude
- Any remarks
Route example:

A Zulu flight plan is simply a flight plan that departs with VFR rules and then continues as IFR.
The following items should be checked in a the flight plan:
- A correct departure and destination
- Flight Rules
- VFR route including ATZ and CTR VRPs until the first IFR waypoint
- Altitude
- Any remarks
Route example:

Note: Y&Z flight plans cannot be sent via VATSIM. Therefore you have to check the route box and change it manually from IFR to VFR or vice versa.
¶ 4.4.4 Free Route Airspace (FRA)
Italy implemented the FRA for all routes above FL195, meaning that all routes above FL195 are no longer existing. While this holds true in real life, on VATSIM routes filed using dismissed airways above FL195 are still accepted.
A pilot using FRA rules can file a flight plan using any valid FRA departure point to any valid arrival point via any number of valid intermediate points. Both arrival and departure points to be considered valid must be connected with the departure/arrival procedures of the selected airport. The valid points are identified as following:
- Using the letter “D” for valid departure point for nearby airport(s)
- Using the letter “A” for valid arrival point
- Using the letter “I” for valid intermediate point
Pilot crossing the italian border can use “horizontal” crossing points to do so, namely:
- “E” points for entering italian airspace
- “X” points for exiting the italian airspace
- “EX” points for either entering or exiting the italian airspace
Please refer to this video for a brief visual explanation from Eurocontrol.
The charts for the italian FRA can be found in AIP → ENR 6 → ENR 6.1
¶ 4.5 Meteorological Aerodrome Report (METAR)
¶ 4.5.1 General Information
METAR stands for METeorological Aerodrome Report and is a coded weather report at a specific point in time used to report weather information. In Italy, the METAR is always published 20 and 50 minutes after the hour in major airports, while in regional airports it’s published every xx:50 of each hour. TAF stands for Terminal aerodrome forecast and it’s a format for reporting weather forecasts. It uses the same code as METARs, with some additions.
More information on how to read METARs and TAFs can be found here.
¶ 4.5.2 How to read a METAR
LIML 200550z 23008G22KT 3500 1400S R35/1200U +TSRA SCT010CB 23/20 Q0996 RESN NOSIG
Each METAR contains the following information:
Airport indicator [LIML]
The ICAO indicator of the reporting station
Day and Time[200550]
The day of the month and the time of the observation in hours and minutes UTC
AUTO
If the weather has been generated by an automated station
Surface wind [23008G22KT]
The mean wind direction in degrees true to the nearest 10 degrees, from which the wind is blowing and the mean wind speed in knots over the 10 minute period immediately preceding the observation. If gusts exceed the mean wind speed by 10kts or more, a letter G and 2 more figures are added to indicate the maximum wind speed. Here’s a list of examples:
- 35015KT = 350 degrees/15 kts
- VRB05KT = variable/5 kts
- 00000KT = CALM.
- 23018G30KT = 230 degrees/18 kts gusting 30
- /////KT = no wind report
- 350P99KT - Winds greater than 100 kts or more shall be preceded by the letter P and reported as P99KT
Visibility [3500 1400S]
Reported in a four figure group (e.g. 0400 = 400 meters; 8000 = 8 km) up to but excluding 10 km; 9999 = more than 10km; 0000 = less than 50 meters visibility.
If there is a very different visibility on the field, the lowest visibility can also be reported along with its direction.
- Minimum Visibility: 1400
- Direction: N/S/E/W
Runway Visual Range (RVR)
- Aerodromes may include a letter indicator R followed by the runway designator, a"/" and the touchdown zone RVR in meters, e.g. R06/0400. If the RVR is assessed on 2 or more runways simultaneously then the RVR group will be repeated.
- If the RVR is greater than the maximum value that can be measured, P will precede this value e.g. R24L/P2000.
- If the RVR is less than the minimum value that can be measured , M will precede this value e.g. R24L/M0050.
- If RVR trends can be measured then U, D, or N will follow the RVR value to indicate increasing, decreasing or neutral.
Present Weather
The following table shows the various abbreviations for present weather phenomena.
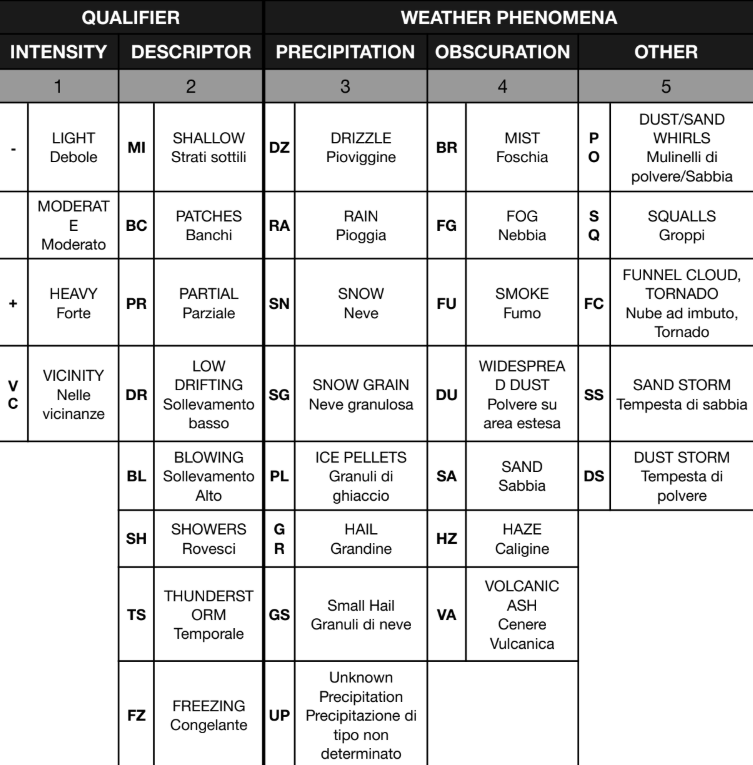
Clouds [SCT010CB]
Cloud amount is reported by the amount:
- FEW = Few
- SCT = Scattered
- BKN = Broken
- OVC = Overcast
Followed by the height of the cloud base in hundreds of feet above aerodrome elevation
SCT018CB = Scattered at 1800 ft Cumulonimbus
Sky obscured is given as VV followed by the vertical visibility in hundreds of feet. When the vertical visibility has not been measured, the group will be VV///.
NSC is used to indicate No Significant Cloud.
CB and TCU indicate convective clouds (respectively cumulunimbus and towering cumulus).
CAVOK
Ceiling and Visibility OK is used when Visibility is more than 10km and no clouds reported.
Temperature & Dew Point[23/20]
Temperature and dew point are reported in degrees Celsius.
QNH [Q0996]
QNH is reported in Hectopascals and preceded by the letter Q e.g. Q1013 = QNH 1013
Recent weather and supplementary info [RESN]
Significant recent weather observed in the period since the last routine observation will be reported by using the code letters for weather preceded by the letters RE e.g. RETS = Recent Thunderstorm.
¶ 5. Rating S1
¶ 5.1 General Information
The S1 controller is assigned the task of working Delivery (DEL) and Ground (GND) positions. If DEL is not online in the airport you are covering, GND will also perform DEL duties. This is referred to as the Top Down Principle.
¶ 5.2 Delivery
The Delivery Controller plays an important role in the safe operation of a flight along its route. Delivery, when available, is the first station to be contacted by the IFR/VFR departing aircraft. Sometimes, a radio check will be asked by the pilot. The controller shall inform the pilot in case his communications are not understandable (volume too low). Delivery is also massively important as it might sometimes assign TSATs to pilots, this effectively means that delivery is responsible for the congestion/efficiency of the airspace above the airport. The delivery controller shall:
- be conscious of his area of responsibility
- check the flight plan route
- assign a departure runway and procedure (SID), if necessary in coordination with the approach controller
- give the IFR initial clearance, including squawk assignment
- check for correctness of the readback
- sequence the flow of aircraft in coordination with GND and inform the crew of the possible delay
- once the pilot is ready for start-up, transfer him to the appropriate ground frequency
- release the traffic to UNICOM if nobody’s online
¶ 5.2.1 VFR Traffic management
VFR Traffic will make first contact with Delivery/Ground with the following information: Callsign, Aircraft type, Flight plan information. Delivery will provide the aircraft with departure information, thereafter the aircraft will be handed off to Ground (if available, otherwise DEL will provide the GND service as well).
Departure information includes:
- runway in use
- winds
- local QNH
Example of phraseology:
Delivery, I-AMCC
I-AMCC, Delivery
Delivery, I-AMCC, C172, 2 People on board, VFR with flight plan, [DEP] to [DEST], request departure information
I-AMCC, roger, Runway in use 20, wind 230/7, QNH 1012
Runway in use 20, QNH 1012, I-AMCC
I-AMCC, Correct, for taxi contact ground on [FREQ]
For taxi contact ground on [FREQ], I-AMCC
¶ 5.2.2 IFR Traffic management
All IFR Flights must be given a route release by the delivery controller, this is done through an IFR Clearance. Before handing out an ATC Clearance, the following items should be checked:
-
Callsign corresponds to what the pilot says
-
Flight rules are Y or I and coherent with all the data in the flight plan
-
The departure aerodrome is correct, spelled correctly
-
The destination aerodrome is the one the pilot requested
-
The first point of the route has a SID available for the current runway in use
-
Check RFL rules (southbound odd/northbound even) in accordance to RAIT
-
Check the remarks section for any additional information
Standard clearances for departing aircraft shall contain the following items:
-
Aircraft identification (callsign);
-
Clearance limit, normally destination aerodrome;
-
Designator of the assigned SID, with transition, if applicable;
-
Runway in use for departures
-
Cleared initial climb level;
-
Allocated SSR code;
-
Any other necessary instructions or information not contained in the SID description, e.g. instructions relating to change of frequency.
Note: The use of a SID designator without a cleared level does not authorize the aircraft to climb on the SID vertical profile.
Delivery, ITY123 request IFR clearance to [DEST], Information A
ITY123, information A correct. Cleared to [DEST] via (SID) Departure, [(TSE) Transition], runway [RWY], climb to [ALTITUDE] ft, squawk [SQUAWK]
Cleared to [DEST] via (SID) Departure, [(TSE) Transition],runway [RWY], climb to [ALTITUDE] ft, squawk [SQUAWK], ITY123
ITY123, Readback correct
Delivery, ITY123 request IFR clearance to [DEST], Information A
ITY123, information A correct. Cleared to [DEST] via (SID) Departure, [(TSE) Transition], runway [RWY], climb to [ALTITUDE] ft, squawk [SQUAWK]
Cleared to [DEST] via (SID) Departure, [(TSE) Transition],runway [RWY], climb to [ALTITUDE] ft, squawk [SQUAWK], ITY123
ITY123, Readback correct, TSAT 13:10
TSAT 13:10, ITY123
WHEN APPROACHING TSAT
ITY123, Confirm aircraft ready?
Aircraft ready, ITY123
Roger, ITY123 contact Ground on [FREQ]
Contact Ground on [FREQ], ITY123
¶ 5.2.2 Coordinations
When a pilot isn’t able to perform a Standard Instrument Departure for any reason (Old AIRAC, No RNAV Capability and more), it may be required for the delivery controller to coordinate a SID with the approach controller, here is an example:
Hello Approach, I have a departure for you, ITY123, out of RWY 12, requesting radar vectors
Roger, runway heading, climb to 6000 ft
¶ 5.3 Ground
The Ground Controller (GND) has the responsibility of ensuring Air Traffic Control Services within the airport movement areas. Its main task is to handle all movements on taxiways (TWY) and aprons. The GND ground controller is responsible for:
-
start-up and push-back
-
the movement of departing traffic taxiing from the apron to the active runway
-
the movement of arriving traffic taxiing from the holding point to the stand after runway vacation
-
the safety of all moving traffic on the ground in apron areas during taxiing
The ground controller shall:
-
Be conscious of his area of responsibility.
-
Regulate and control the movement of aircraft and ensure the orderly movement of aircraft on the aprons.
-
Assigns aircraft stands based on aircraft type (wingspan), airline (low cost or not), origin (Shenghen or not) or pilot request.
-
Manages start-up sequences and authorizations in accordance with TSAT/CTOT/EOBT.
-
Applies the movement restrictions on the maneuvering area as foreseen and published in the AIP.
-
Constantly updates the aircraft status using the “STS” column in the departure list.
-
Sequence aircraft on the ground for efficient departure flow.
¶ 5.3.1 Ground movements
PUSHBACK: Since aircraft cannot taxi backwards (as the use of reverse thrust is forbidden for maneuvering), big aircrafts usually have to be pushed back by a tug from the parking position to a taxiway (pushback). In some cases, there are also parking positions where the pilot can taxi out on his own (taxi-out positions - self maneuvering stands). You can see whether a pushback is required for a position at most airports in the Ground Movement Charts (AIP). General aviation aircraft USUALLY don’t need pushback.
The pushback usually takes place on a taxiway. If there are several ways in which the pushback can take place, you as an ATC must tell the pilot how it should be done. The most often given instruction is the direction in which the pilot should look after the pushback (e.g. facing north). Different taxiways can also be specified in the pushback clearance (e.g. a taxiway that is not directly behind the stand or, if available, a start-up position).
It should be noted that the taxiway where the pushback is taking place will be blocked for several minutes (varies depending on the aircraft type and pilot). For this reason, it is particularly important that you have an eye on the entire situation and above all, work with foresight, especially at large airports.
If the pushback is not immediately possible, this must be communicated to the pilot with “stand by” and optionally a short info on what he still has to wait for. If there are two waiting outbounds on the frequency that are both ready for pushback, depending on the situation, it can also be advantageous to deviate from the “first come, first serve” principle if this can reduce the waiting times overall (least average delay - lowest average delay). Remember: when the pilot is requesting pushback it also means that the engines are off. This is the best opportunity to put traffic on hold if needed, as there is no high consumption of fuel involved that may otherwise jeopardize the safety of the flight.
Before handing out a startup & pushback clearance, the following items should be checked:
-
the aircraft has received its ATC Clearance
-
the aircraft is squawking the assigned code
-
no other traffic has been cleared to taxi behind the pushing traffic
-
there’s at least 1 stand in between for simultaneous pushback (be aware that on VATSIM more space may be needed, do not rely on this rule and consider extra spacing for safety)
-
no more of 4 aircraft are waiting for departure at the holding point of the cleared departure runway (consider also traffic already taxiing toward the runway holding point in this count)
Example of phraseology for a push & start clearance:
ITY1123, request push & start, stand 110
or
ITY1123, request startup, stand 401
ITY1123, push & start is approved, facing east
or
ITY1123, startup is approved
ITY1123, request push & start, stand 110
or
ITY1123, request startup, stand 401
TAXI: Aircraft will report ready to taxi once the pushback/startup has been completed or, alternatively, will call you once the runway has been vacated for taxi instructions to the gate. In both cases taxi instructions are given in the same format.
Standard taxi instructions should include:
-
limit of taxiway (TWY), preferably a holding point or an IHP (or a stand for inbound traffic)
-
taxi route
-
any additional information such as TORA, traffic or reports
Before handing out a taxi clearance, the following items should be checked:
-
the aircraft has received its startup & pushback clearance (if IFR)
-
aircraft is squawking assigned code [if required]
-
no other traffic has been cleared to taxi in a converging route unless given appropriate conflict avoidance instructions.
-
type of aircraft category and taxiway restrictions procedures
Example for taxi instructions:
Ground, I-AMCC, request taxi
I-AMCC, taxi to holding point Alpha, RWY 20, via TU, T
Taxi to holding point Alpha, RWY 20, via TU, T, I-AMCC
IN CASE YOU WANT TO INSTRUCT THE TRAFFIC TO DEPART FROM A DIFFERENT HOLDING POINT THAN ALPHA
I-AMCC, ADVISE ABLE to depart from intersection Bravo, reduced TORA 2400 m
Able to depart from intersection Bravo, I-AMCC
[WHEN TRAFFIC IS APPROACHING THE HOLDING POINT] I-AMCC, Contact Tower on [FREQ], bye
Contact Tower on [FREQ], I-AMCC
Depending on the traffic situation, hold shorts or give way instructions must be used to resolve possible conflicts on the ground. If it’s assumed that two aircraft are not in conflict with each other despite crossing taxiways (e.g. due to sufficient distance), no such instruction needs to be given. However, the situation must continue to be observed and ATC must intervene if necessary. For new controllers it is very difficult to assess when a conflict exists and when not. Therefore, we want our trainees to always work according to the “safety first” principle: It’s best to give too many “hold shorts” instructions than too little. Another rule of thumb is to always manage arriving traffic before departing traffic, when possible.
Example of hold short instruction:
Ground, I-AMCC, request taxi
I-AMCC, taxi to holding point Alpha, RWY 20, via TU, hold short T
Taxi to holding point Alpha, RWY 20, via TU, hold short T
Once the other aircraft has passed
I-AMCC, Continue taxi via T, holding point A, RWY 20
Continue taxi via T, holding point A, RWY 20, I-AMCC
Example of taxi instruction with “GIVE WAY”:
Ground, I-AMCC, request taxi
I-AMCC, taxi to holding point Alpha, RWY 20, via TU,T, give way to traffic A320, passing left to right, on T
Taxi to holding point Alpha, RWY 20, via TU, T, give way to traffic A320, left to right on T, I-AMCC
This type of instruction can also be incorporated with “conditional clearances”, for example if the A320 is yet to pass by I-AMCC, you may instruct I-AMCC to “hold short T and continue taxi after passing A320 left to right on T”.
Example of taxi instruction with “CROSS RUNWAY”:
Ground, I-AMCC, holding point Alpha, RWY 12.
I-AMCC, cross RWY 12 at Alpha.
Crossing RWY 12 at Alpha, I-AMCC
Runways are under the responsibility of the TWR, when a runway is not active, or for operational reasons, the TWR may delegate the authority of authorizing runway crossings to the GND controller. Only in this case a GND controller may give a runway crossing clearance.
Note on conditional clearances and hold short instructions: do not assume that all pilots are familiar with these instructions. The suggestion is to limit their usage only to pilots that demonstrate mastery with procedures in previous calls or to supervise carefully their execution in case of doubt and be ready to instruct “hold position” as required.
Red carpet rule: After giving a taxi instruction, the path given is “booked” for the specific traffic. It means that subsequent instructions to other traffic that use or cross this “booked” path cannot be given. This situation is represented in a figurative way with a “red carpet” that no one can “walk on” except the traffic to whom it was given.
In case of need, the red carpet can be reworked by giving an instruction that amends the previous, freeing the path to other traffic. The issue can also be sometimes circumnavigated by giving conditional instruction to the other traffic so as to avoid using the red carpet of other traffic. Alternatively, hold short instructions that do not conflict with the red carpet can be given and subsequently the traffic can be instructed on how to proceed the taxi once the red carpet is not blocking anymore
¶ 5.3.2 Coordinations
It is important for the ground controller to:
-
Communicate with the delivery in order to optimize the pushback and startup sequence.
-
Communicate to any other GND controller in order to optimize the traffic flow (for example LIRF may have 2 GND controllers simultaneously).
-
Hand-off traffic to the TWR in the right sequence and in a timely manner in order to minimise delays.
-
Inform the TWR in case a traffic requests a different holding point rather than standard one.
-
TWR may ask the GND controller to stop push backs due to congestion or due to an emergency. Ideally the GDN controller should always have a good situational awareness and avoid to approve too many push backs or give too many taxi instructions creating a queue for the TWR to handle.
-
TWR may delegate to the ground controller the authority to give (or relay) a runway crossing instruction.
¶ 5.3.3 Communication priority
When trasmitting information and clearances to pilots, the controller shall give priority to certain instructions to always grant an safe and expeditious flow of traffic.
The following list shall be used to determine which instruction has priority over another.
- Hand-off to other stations
- Taxi to gate/stand
- Taxi to runway
- Pushback and startup
- IFR/VFR clearance
- Other information
¶ 6. Rating S2
¶ 6.1 General Information
The S2 controller is assigned the task of working Tower (TWR) position. If DEL and GND are not online in the airport you are covering, TWR will also perform DEL/GND duties for that airport. This is referred to as the Top Down Principle and it also applies to higher up positions: If Tower is not online, Approach will provide Tower services for that airport and so on.
All the theoretical and practical knowledge of the Rating S1 is a mandatory pre-requisite for the S2 rating.
¶ 6.2 Tower
S2 controllers are effectively Tower (TWR) controllers (also referred to as “aerodrome controllers”). They are responsible for the provision of air traffic services to Aerodrome Traffic Zone (ATZ). Their area of responsibility includes:
-
the maneuvering area, i.e. runway(s) and taxiway(s). It should be noted that although the TWR controller communicates with aircraft on the apron(s) as well, this is not part of their area of responsibility.
-
the airspace in the vicinity of the aerodrome (usually within a range of a radius of 2~2.5NM from the middle point of the longest runway and from the ground level to 2’000ft ASL). Please note that ATZ may have custom shapes due to territory conformation, the presence of nearby airfields or forbidden areas.
Tower controllers are the core ATC position at any airport as this is the position where departures and arrivals come together: aerodrome ATCs are responsible for issuing landing and takeoff clearances, therefore they manage the most intense phases of flights. The Tower controller should also be conscious that this is also the most intense part of the flight for a pilot as well. It should be considered that on VATSIM almost all pilots are performing solo flights on aircrafts that in real life are operated by at least 2 pilots. This increased workload may require additional support from the Tower controller on a case-by-case basis.
Each controller shall:
-
be conscious of his area of responsibility.
-
provides top-down in case GND/DEL are offline
-
ensures safe radar separation between arriving traffic and departing
-
ensure the minimum wake turbulence separation for all arriving or departing traffic
-
ensure that VFR traffic are operated in such a manner that they don’t represent a danger for other VFR or IFR traffic
-
constantly updates the aircraft status in the departure list
¶ 6.2.1 Communication priority
When trasmitting information and clearances to pilots, the controller shall give priority to certain instructions to always grant an safe and expeditious flow of traffic.
The following list shall be used to determine which instruction has priority over another.
- Landing clearance
- Instructions to aircraft in the air (usually VFR)
- Takeoff clearance
- Hand-off to other sectors
- RWY crossing
- Taxi to gate/stand
- Taxi to runway
- Pushback and startup
- IFR/VFR clearance
- Other information
¶ 6.2.2 Runway in use and WX information (WX)
Runway in use shall be used to indicate the runway that is considered by the ATC to be the optimal runway from which aircraft shall take-off and land. An optimal runway offers head wind for both departing and landing traffic. Sometimes this cannot be achieved due to specific airport’s SOP, mainly due to noise abatement procedures in place, geographical conformation of the surrounding territory or geographical conformation of the runways available. The AIP reports the information needed in order to determine the preferential runway.
The runway in use shall be chosen based on:
-
the current weather conditions
-
preferred runway as prescribed in the SOP of the airport (e.g for LIML runway 35 shall be used with a tailwind component up to 7 Knots.)
-
current traffic
-
type of traffic (e.g. some runways are designed only for General Aviation)
Even if a TWR controller defines a specific runway to be the active one and publishes it on the ATIS, a pilot can request to use a different one. The Tower controller then considers the request and decides if to approve or reject. In case of approval the pilot may expect to be delayed. This applies to both departing and arriving traffic.
Note: You can also use flightradar24 to identify which runway is currently being used in real life. Using the same runway, however, is not mandatory. The Tower Controller has the final decision on which runway to use.
Weather information is essential in our job and every pilot must be kept up to date with the latest weather on the field.
As an S2 controller you must be able to read METARs, in case you’re missing something, check Chapter 3.5
Example of phraseology for the following METAR
METAR LIMP 131050Z 18006KT 9999 FEW030 21/12 Q1012
Tower, I-JACK, request latest weather information
I-JACK, Tower, RWY 20, Wind 180 Degrees 6 Knots, Visibility more than 10km, Few at 3000ft, Temperature 21, Dewpoint 12, QNH 1012
RWY 20, QNH 1012, I-AMCC
Note: PILOTS MUST ALWAYS READ BACK QNH
¶ 6.2.3 Aerodrome Separation
¶ 6.2.3.1 Traffic Pattern
A Traffic Pattern (also called VFR circuit or traffic pattern) is a VFR Procedure which allows pilots to fly around an airport in an organized manner. The pattern is rectangular and it helps ATC keep traffic flow under control while also providing the pilot with the safest way to fly around an airport. Traffic patterns are usually flown at 1000 or 1500 ft (AGL) (depending on the type of aircraft you’re flying), however some airports may have different procedures in place. A traffic pattern is divided into various parts called “legs”, every leg defines a particular phase of the pattern.
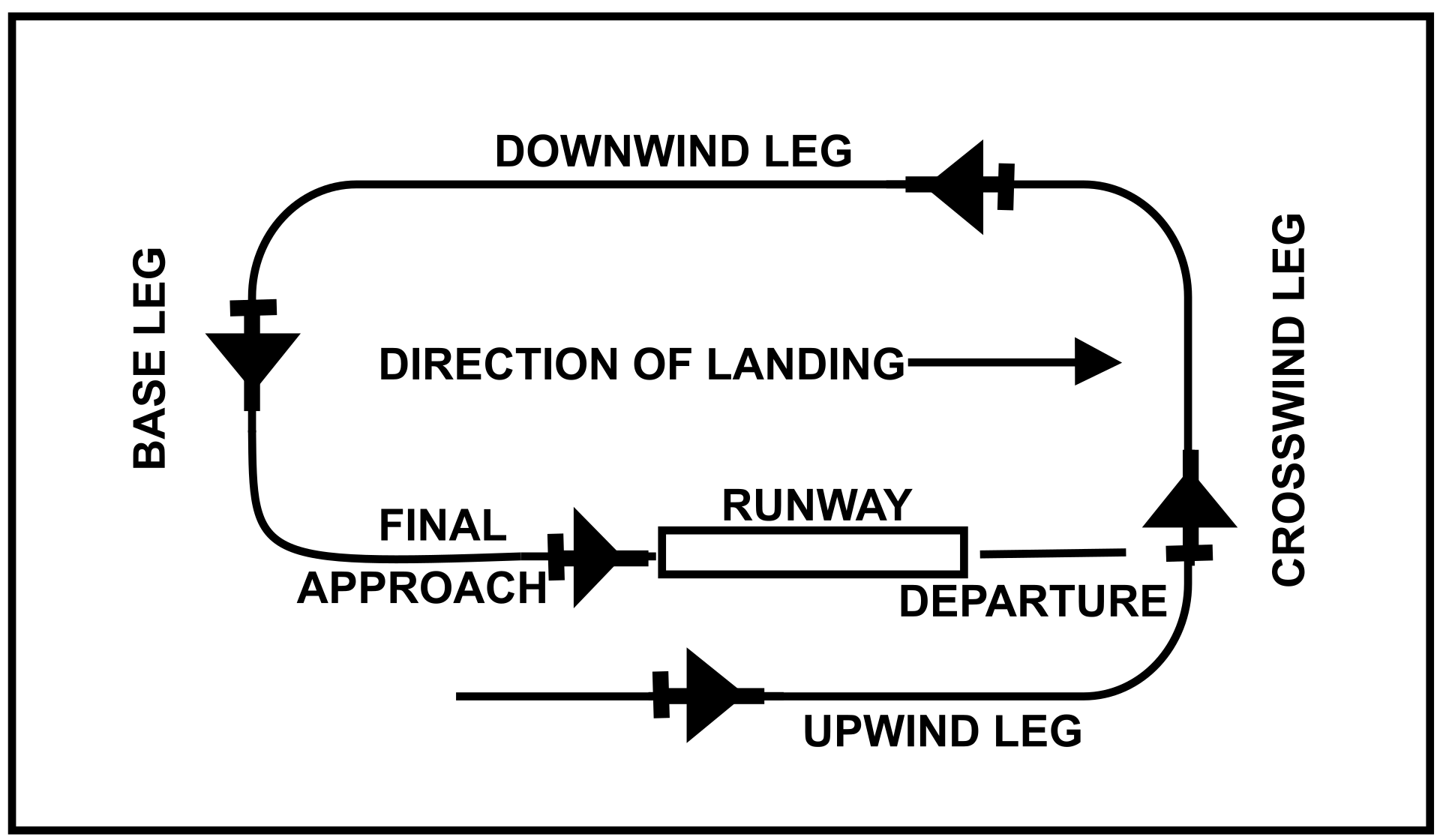
Note: The standard traffic pattern is flown with left turns, some airports may have non standard (right) traffic patterns. refer to the AIP or SOP of the specific airport.
The number of aircraft kept within the traffic pattern is limited for safety reasons, usually not more than 2 aircraft during daytime and only 1 at night time. Further requests to join the traffic pattern from arriving traffic are evaluated by the Tower controlled and traffic not allowed to join the traffic pattern is instructed to wait at relevant Visual Reporting Point (usually to orbit over it). In case of saturation of the limit of aircraft number allowed to stay in the traffic pattern, the Tower controller coordinates with the Ground and or Delivery controller so that new traffic doesn’t get cleared to leave the stand and informed of the expected delay.
Example of phraseology for a traffic pattern:
I-AMCC, request to join traffic pattern for a full stop
I-AMCC, roger, join left/right downwind runway 36, report downwind
I-AMCC, request to join traffic pattern for a full stop
I-AMCC joins left/right downwind
On left/right downwind, I-AMCC
I-AMCC roger, report left/right base runway 36
Will report left/right base runway 36, I-AMCC
I-AMCC is entering left/right base
Left/right base runway 36, I-AMCC
I-AMCC roger, report on final runway 36
Wilco, I-AMCC
I-AMCC is on final
On final, runway 36, I-AMCC
I-AMCC roger, runway 36 cleared to land, wind calm
Cleared to land runway 36, I-AMCC
¶ 6.2.3.2 Wake Turbulence
Consecutive departures are subject to separation in order to prevent collisions and guarantee an adequate separation standard. Normally subsequent departures need to be separated by 2 minutes or more.
The reason why time is used rather than a distance in nautical miles is because not all Tower controllers have a radar service available, therefore as a matter of standardization of the rules, time is used instead. The time is always taken from the rotation point (the moment in which the aircraft front wheel detaches from the ground. In VATSIM it is safe to consider a realistic enough rotation point, the one at 2 ⁄ 3 of the runway length.
Details of the separation applied depends on circumstances, for example whether aircraft are using the same, parallel or crossing runways, and whether using the same or different take-off commencement or touchdown positions.
A departing aircraft following traffic performing a missed approach requires the same separation as if the missed approach traffic was a departure.
Departing traffic also needs proper separation from traffic departing from a different runway at the same airfield, and particular cautions needs to be placed if both traffic are using the same exit point in their SIDs.
Here’s a table with the wake turbulence separation between IFR traffics:
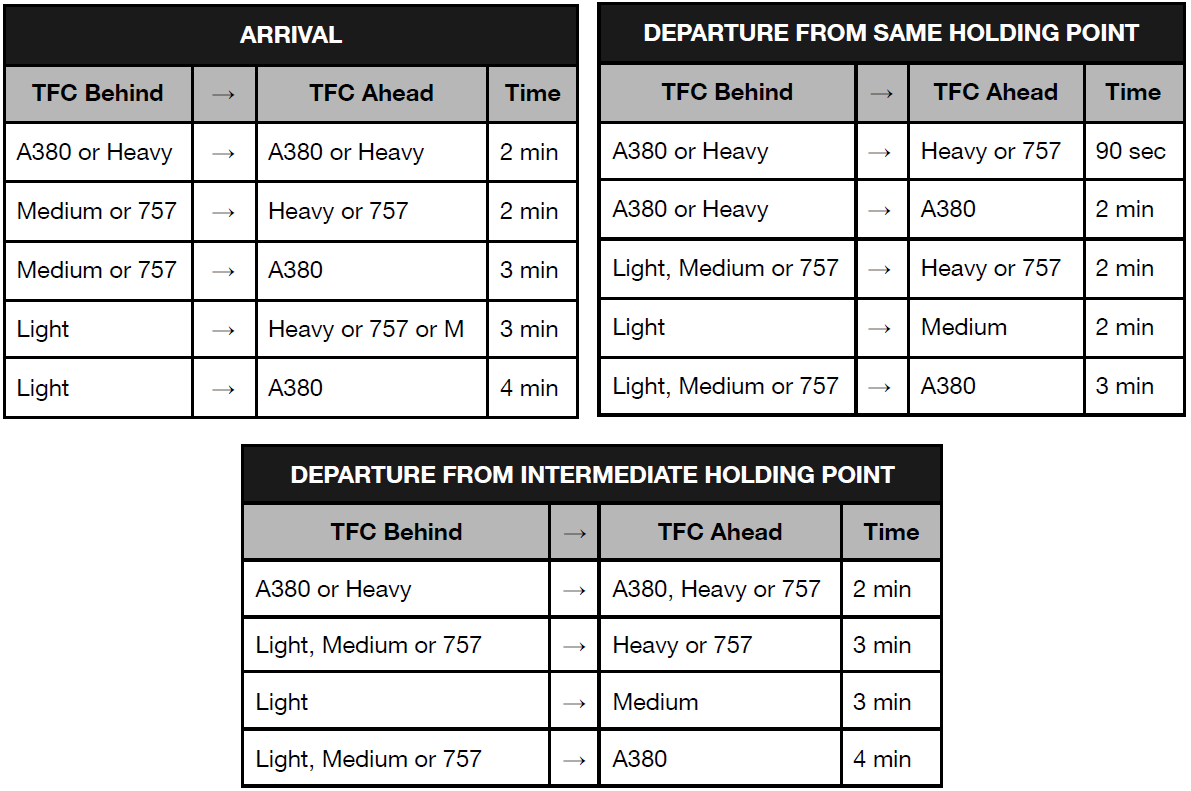
Not applying these separations will result in the traffic behind experiencing ‘WAKE TURBULENCE’ , this phenomena is extremely dangerous, especially for aircraft landing and taking-off. This phenomena is already being simulated in some flight simulator software and may be simulated in more simulators in the near future, therefore applying this precaution is not just a theoretical exercise on VATSIM.
VFR traffic may proceed at its own discretion after being informed about the wake turbulence, as they remain responsible to assure their own separation with other traffic.
Example of phraseology for a VFR:
I-AMCC, join final RWY 20, caution wake turbulence B738 Medium, on final RWY 20, number 2.
Joining final RWY 20, traffic in sight, I-AMCC
While wake turbulence is normally the main concern regarding departure separation, there maybe other constraints such as two aircrafts flying the same route with the following one being faster than the previous (eg. a private jet taking off behind a heavy aircraft).
In this case an appropriate separation has to be discussed and coordinated with the APP controller.
¶ 6.2.3.3 Access to runway for departing traffic
Traffic departing an aerodrome can access the runway, after Tower controller approval, through the following points:
-
Published holding points on runway heading or on extended runway heading
-
Published holding points on runway intersections (with taxiway, reduced TORA value should have been already communicated by the GND controller)
-
On either of the above followed by a backtrack maneuver to reach the opposite runway direction
Example of backtrack phraseology:
ITY 123, backtrack and line up runway 25
Backtrack and line up runway 25, ITY 123
After ITY 123 went from its runway’s entry point to the threshold of the opposite direction
Ready for departure, ITY 123
ITY 123, runway 07, cleared for takeoff, wind 210 degrees at 4 knots
Runway 07, cleared for takeoff, ITY 123
The traffic can be authorized, or authorized conditionally to enter the runway under the following circumstances:
-
The runway is free of any traffic
-
The runway has a traffic that already initiated the takeoff maneuver (conditional)
-
The runway has an arriving traffic that already touched down
-
The runway has an arriving traffic that is on final leg (conditional)
Case 1 - the runway is free of any traffic (on the ground or incoming)
This is the safest case, in which the Tower controller authorizes the traffic to line up on the runway.
Holding point BB, runway 25, ITY 123
ITY 123, runway 25 cleared for takeoff, wind 210 degrees at 7 knots
Cleared for takeoff runway 25, ITY 123
Case 2 - the runway has a traffic that already initiated the takeoff maneuver (conditional)
In this case there is a queue and the Tower controller is trying to expedite the flow of departing traffic by lining up an aircraft behind another departing (a typical example is when the first departing traffic is using an intersection).
Runway 25,ready for departure, ITY 123
ITY 123, runway 25 cleared to take off, wind 210 degrees at 6 knots
Cleared to take off, runway 25, ITY 123
After ITY 123 started moving
ITY 669, after departing traffic [TYPE], runway 25, line up and wait after
Runway 25, after departing traffic, line up and wait after, ITY 669
Case 3 - the runway has an arriving traffic that is on final leg (conditional)
In this case the arriving traffic is still flying, therefore this is the most dangerous clearance to give because a misunderstanding may cause a runway incursion and potentially a collision. When giving this clearance pay maximum attention to the readback and the action taken by the pilot.
ITY 123, runway 25, cleared to land, wind 210 degrees at 6 knots
Cleared to land, runway 25, ITY 123
ITY 669, traffic is A320 on final runway 25, report traffic in sight
Traffic in sight, ITY 669
ITY 669, behind landing traffic A320, runway 25 line up and wait behind
Behind landing traffic line up and wait behind, ITY 669
¶ 6.2.3.4 Delay actions
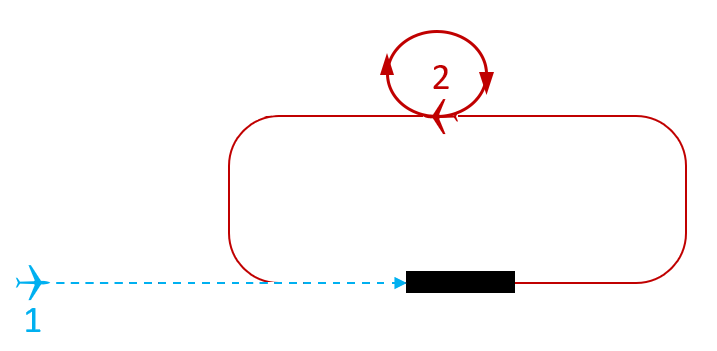
An ATCO may issue delay actions when required, in order to maintain the traffic in a circuit constantly separated. A traffic in circuit may be instructed to orbit or to extend the downwind.
Orbit instruction must be issued only when the traffic is on downwind. It is strongly recommended to avoid orbiting on final or on base, unless on pilot’s request, as it may compromise safety and/or traffic flow optimisation.
Orbits should be external to the traffic pattern, this means that if a traffic is on right downwind, they need to orbit left, otherwise they will orbit over the field causing loss of separation.
Example of phraseology:
I-AMCC, on left downwind RWY 20, orbit right due to traffic
Roger, orbiting right, I-AMCC
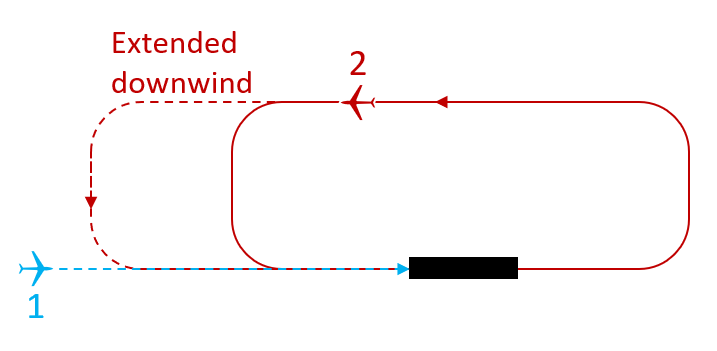
Downwind extension must be issued only when the traffic is on downwind and the ATC believes that the extension will last not more than 30 seconds. If you’re trying to insert traffic behind an arrival, it is strongly recommended to use this manouver to save up time, but you need to keep in consideration the wake turbulence factor. Therefore if you believe that with the extension you will waste a lot of time, consider an alternative solution, like instructing to orbit (on downwind) or to reach a published or geographically significant point where to orbit.
When extending the downwind, the pilot must be informed about other traffic and to report the mentioned traffic in sight, in order to minimize delay and to join final. In case the traffic is not reported in sight, the Tower controller takes appropriate action in order to assure separation.
Example of phraseology:
I-AMCC, extend downwind for RWY 20 [REASON] or [TRAFFIC INFORMATION]
Extending downwind RWY 20, I-AMCC
¶ 6.2.4 Traffic Information
Traffic information is information issued by an air traffic services unit to alert a pilot of other known or observed air traffic which may be in proximity to the position or intended route of flight and to help the pilot avoid a collision. (ICAO Doc 4444: PANS-ATM.) In controlled airspace some flights may not be provided with air traffic clearances but they must receive traffic information from ATC. For example, in class “D” airspace VFR flights receive traffic information in respect of other IFR and VFR flights. According to ICAO Doc 4444 provisions the traffic information message shall comply with the following phraseology:
To give a traffic information
-
[ATC] TRAFFIC is [type] [position] [level] [further info/instructions];
-
[ATC] ADDITIONAL TRAFFIC is [type] [position] [level] [further info/instructions];
To acknowledge a traffic information
-
[PILOT] ROGER, LOOKING OUT;
-
[PILOT] TRAFFIC IN SIGHT;
-
[PILOT] NEGATIVE, NO TRAFFIC IN SIGHT;
Traffic information can be also included in the ATC clearances concerning multiple line-ups and conditional clearances. Where reduced runway separation minima between aircraft for the same runway is used, the provision of traffic information to the flight crew of concerned succeeding aircraft is a condition for application of the reduced runway separation minima.
Here are a few examples:
I-AMCC, Traffic C172, left Chivasso for Volpiano, at 2000ft
Roger, Looking Out, I-AMCC
I-AMCC, Traffic C172, turning right downwind, runway 36
Roger, Traffic in sight, I-AMCC
I-AMCC, Traffic, B738, 3nm on final, runway 36
Roger, Looking Out, I-AMCC
I-AMCC, Traffic, P208 on departure leg, runway 36
Roger, In sight, I-AMCC
¶ 6.2.5 Radar Identification
Identifying an aircraft in an ATS surveilled airport is essential in order to maintain constant separation between the traffic. As a TWR controller you need to ensure that all IFR/VFR traffic is squawking assigned code and has transponder ON. Exceptions are made for airports without radar surveillance.
- Mode SBY
- Mode C
Departing/Arriving traffic
When the aircraft is airborne or inbound, the Tower controller needs to ensure the pilot has activated the transponder in mode C and that it’s squawking the assigned code. If everything is correct, the Tower controller identifies the traffic. Inbound traffic may have already been identified by previous controllers. In case the traffic is using a 2000 (for IFR traffic) or 7000 (for VFR traffic) squawk code, this is usually an indication that the traffic was operating in UNICOM for the whole flight. In this case the Tower controller assigns the appropriate squawk and identifies the traffic.
Mode STANDBY to Mode C
RYR365, squawk mode Charlie
Squawking mode Charlie, RYR365
Assigning a squawk
RYR365 squawk 3655
Squawking 3655, RYR365
Identifying a departure
RYR365 identified passing 1200 ft contact [FREQ]
Contact [FREQ], RYR365
¶ 6.2.6 VFR Traffic Management
¶ 6.2.6.1 Departing VFR
Departing VFR traffic must have filed a flight plan containing an initial valid Visual Reference Point (VRP) within the ATZ. A Visual Reference Point is usually a point published on the VFR charts. Some airports have specific procedures for departing and arriving VFR traffic, using VRP called entry and exit gates. If the pilot’s intention is to perform traffic patterns, no VRP declaration is needed on the flight plan. Outbound traffic, after reaching their ATZ VRP, they may proceed to the next VRP within the CTR and then they will be coordinated with the Approach controller with the following information:
-
callsign
-
estimated Time Over [ETO] VRP
-
altitude
Example of phraseology for a departing VFR:
I-CRAB, RWY 12, cleared for takeoff, wind 240 degrees at 12 knots, left after to ANSA RENO
Cleared for takeoff, RWY 12, left after, I-CRAB
I-CRAB, airborne at 12, report ANSA RENO at 1500 ft
Will report ANSA RENO, 1500 ft, I-CRAB
Example of phraseology for a coordination between TWR - APP for a VFR departure:
Hello Approach, I have an inbound for you, I-CRAB, estimating CENTO at 20, at 1500 ft
Roger, copied the traffic, thank you.
Note: Same applies when the VFR is arriving. Just invert the roles 🙂
¶ 6.2.6.2 Arriving VFR
Arriving VFR will be provided with the latest weather information when no ATIS is available, otherwise they will be provided with:
- runway in use
- winds
- QNH
Example of phraseology for an arriving VFR:
Buongiorno Tower, I-AMCC, request arrival information
I-AMCC, Tower, Buongiorno, runway in use 36, wind 300 degrees, 3 knots, QNH 1013
Runway 36, QNH 1013, Grazie, I-AMCC
I-AMCC, correct, report overhead the field at 2000 ft
If the pilot doesn’t have a flight plan he will request an abbreviated flight plan and provide you with the valid information.
¶ 6.2.6.3 Overflying VFR
A VFR traffic may also overfly the CTR or ATZ from point A to point B and he shall be provided with:
- Present weather [if any]
- Clouds [if any]
- QNH
Example of phraseology for an overflying VFR:
Tower, I-AMCC, inbound PEN1, would like to cross your CTR via PES1 at 1500ft
I-AMCC, Tower, cleared to cross the control zone via [VRP], report over [VRP] at [altitude], QNH 1016
Will report over [VRP], QNH 1016, I-AMCC
¶ 6.2.7 IFR Traffic Management
¶ 6.2.7.1 Departing IFR
An aircraft should be issued a takeoff clearance when they have reported to be fully ready, until then, no takeoff clearance should be issued in order to avoid runway occupancy for a longer period.
Before handing out a takeoff clearance, the following items should be checked:
-
Aircraft is squawking assigned code
-
Aircraft is ready for departure
-
The runway is free and no other traffic is on final, unless they have safe separation
-
The traffic is not hold for release by the Approach Controller
Example of phraseology for a takeoff clearance:
ITY1123 are you ready for departure?
Affirm, ready for departure, ITY1123
ITY1123, RWY 12, cleared for takeoff, wind 100 at 10 knots
Cleared for takeoff RWY 12, ITY1123
Holding point AB, runway 25, ITY 123
ITY 123, runway 25 line up and wait, report when ready for departure
Line up and wait runway 25, wilco, ITY 123
ITY123 is ready for departure
Fully ready, ITY 123
ITY 123, runway 25, cleared for take off, wind 210 at 7 knots
Cleared for take off, runway 25, ITY 123
ITY123 is airborne
ITY123, contact Bologna Approach on 133.775
Contact Bologna Approach on 133.775, ITY123
In case of high frequency runway occupation, such as during an event, conditional clearances may be issued in order to avoid long queues at the holding point and to minimize delays.
Example of phraseology for a conditional clearance:
ITY1123, traffic is A320, 3 nm on final RWY 30, report traffic in sight.
Traffic in sight, ITY1123
ITY1123, behind landing traffic A320, RWY 30, line up and wait behind.
Behind landing traffic, line up and wait RWY 30 behind, ITY1123
¶ 6.2.7.2 Arriving IFR
Similarly to departures, IFR traffic will be issued a clearance to land when the runway is free. The runway is assumed to be occupied when:
-
an aircraft or a vehicle is on the runway whether rolling, taxiing or waiting
-
an aircraft is landing on the runway from runway threshold until the touchdown
-
an aircraft is taking-off - until the runway limits are left
-
an aircraft is making a touch and go or a low pass - until the runway limits are left
-
an aircraft or a vehicle are between the runway and the holding point bar
If the approach minima has been passed with no landing clearance, the pilot will execute a missed approach (go around). A missed approach procedure is the procedure to be followed if an approach cannot be continued. It specifies a point where the missed approach begins, and a point or an altitude/height where it ends.
-
In case of a missed approach, the traffic should be instructed to perform the missed approach maneuver (standard or be given different indications), issued the MISAPP tag and handed to the Approach controller with no delay. Further advice by voice or text would be appreciated. The missed approach procedure in use is defined in coordination at logon between the Tower and the Approach controllers.
-
It is fundamental to not disturb the pilot with useless requests during the go around procedure, due to the heavy workload on their end, especially because on a simulator they are flying alone.
-
Eventually, intentions and reason for go around will be explained to the Approach controller by the pilot whenever they have time to ensure safety for the following traffic.
Example of phraseology for a missed approach:
ITY1123 going around, unstable approach
ITY1123, roger, perform standard missed approach procedure [climb to xxxx ft]
Perform standard missed approach [climbing to xxxx ft]
ITY1123, contact Bologna Approach on 133.775
Contact Bologna Approach on 133.775, ITY123
Note1: After an IFR arrival goes around, if not cited in the airport SOPs, all departures are held for release until further notice by the APP Controller.
Note2: If the traffic is VFR, you may instruct them to join the downwind in order to clear the departure path.
¶ 6.2.8 Circle to land
When an aircraft intends to land on a runway for which no instrument approach procedure exists, it may descend on the instrument approach to another runway and, provided the required visual references are established at the circling Minimum Descent Altitude/Height, maneuver visually for landing on the desired runway. This procedure is used when landing on the instrument runway is undesirable, due for example to wind conditions or work in progress.
Example phraseology for a circle to land approach:
ITY123 is with the APP controller
ITY 123, cleared ILS Z runway 28 followed by circle to land runway 10
Cleared ILS Z runway 28 followed by circle to land runway 10, ITY 123
The traffic is stable on the ILS Z runway 28
ITY 123, contact Tower on 128.350
Contact Tower on 128.350, ITY 123
Tower, ITY 123, established on ILS Z runway 28 for circle to land on runway 10
ITY 123, continue approach runway 28, report breaking to the left/right, QNH 1013
Will report breaking to the left/right, ITY 123, QNH 1013
ITY123 is breaking to the left/right
Breaking to the left/right, ITY 123
ITY 123, roger, runway 10, cleared to land, wind 110 degrees at 9 knots
Cleared to land, runway 10, ITY 123
Note: It is preferred to issue the landing clearance before joining the base turn in order to let the pilots focus only on the controls.
WARNING: In case of missed approach/go around, the traffic performing the circle to land (CTL) maneuver, shall join the missed approach procedure for the instrumental approach that was cleared BEFORE the circle to land. For example, a traffic performing ILS Z 28 followed by CTL 10 shall join the missed approach procedure for the ILS Z 28 by performing a visual maneuver and turning back on course.
¶ 6.2.9 Coordinations
Coordination on a TWR Position mainly occurs with APP and GND. A list of cases where a tower ATC may coordinate, includes (but is not limited to):
WITH GND
-
Where GND should hand over the traffic to TWR
-
Whether TWR should instruct the traffic to monitor or contact the GND (see also Standard 1 procedure for LIRF)
-
Whether GND should instruct the traffic to monitor or contact the TWR frequency (with high traffic the TWR may prefer departing pilots to monitor the frequency rather than increase the frequency usage, considering that arriving traffic has always the priority over departing ones)
-
In case GND has a non-normal traffic
-
In case TWR needs GND to stop feeding traffic due to overload of the runway capacity
-
In case of emergency traffic or runway closure
-
In case of traffic that needs to be released
-
In case of emergency traffic or runway closure
WITH APP
-
In case of go-around
-
In case of traffic that needs to be released
-
In case TWR needs more space between subsequent arrivals
-
In case TWR wants to reduce separation between subsequent departures
-
In case of outbound/inbound VFR/SVFR/NVFR
-
In case of emergency traffic or runway closure
¶ 7. Rating S3
¶ 7.1 General Information
The S3 controller is assigned the task of working Approach (APP) position. If DEL, GND and TWR are not online in the airport you are covering, APP will perform all their duties. This is referred to as the Top Down Principle.
All the theoretical and practical knowledge of the Ratings S1 and S2 is a mandatory prerequisite for the S3 rating.
¶ 7.2 Approach
The Approach (APP) controllers are responsible for the provision of air traffic service to departing and arriving traffic in a TMA, CTR or CTA. They are the link between the Tower and Area controllers and normally serve aircraft during the climb, descent and approach phases. Unlike the Tower controllers that are assigned to a single aerodrome (and sometimes a single runway), the APP controllers may serve flights from several (nearby) aerodromes.
Similarly to the Tower controller, the APP controller works mostly with traffic that arrives to or departs from the aerodrome(s). While there are some transit overflights as well, these do not normally form a large proportion of the overall traffic.
The approach controller shall:
-
Be conscious of his area of responsibility
-
Provide top down if the local controller is offline.
-
Identify an aircraft correctly
-
Understand horizontal and vertical airspace boundaries.
-
Issue approach clearances using prescribed phraseology.
-
Adjust aircraft speed, heading, and altitude as needed to achieve and optimize the required separation in the sequence.
-
Apply separation minima as required.
-
Demonstrate an understanding of the different types of approaches.
-
Issue holding instructions using prescribed phraseology if required
-
Correctly transfer radar tag ownership and communication to the next controller.
¶ 7.3 What is a radar
An approach controller normally works with a radar, a system that uses radio waves to determine the distance), direction, and radial velocity of objects relative to its site. Direct communication between the pilot and the controller must be established before providing radar services.
The number of aircraft receiving ATS surveillance services simultaneously must not exceed the safe handling capacity of the facility, considering:
-
The structural complexity and sector capacity of the control area
-
The tasks to be performed within the control area
-
The workload of the controller
The radar system can be utilized to assist ATC in performing its duties. The information provided by the radar and displayed on a situation display can be used to perform air traffic control functions, such as:
-
Providing radar services to enhance airspace utilization, reduce delays, allow for direct routings and optimal flight profiles, and increase safety
-
Vectoring departing aircraft to facilitate efficient departure flow and expedite climbing to cruising level
-
Vectoring aircraft to resolve potential conflicts
-
Vectoring arriving aircraft to establish an efficient approach sequence
-
Assisting pilots with navigation to or from a radio navigation aid and avoiding areas of adverse weather
-
Providing separation and maintaining normal traffic flow in case of communication failure within the coverage area
-
Monitoring the flight path of air traffic
¶ 7.4 SIDs & STARs
Where Standard Instrument Departures (SIDs) and Standard Arrival Procedures (STARs) have been established, the defined procedures are to be used. Any procedure published may be modified by specific ATC instruction and the commander may accept alternative instructions with the provision that the appropriate obstacle clearance criteria are met. The final approach must be flown visually or in accordance with the established instrument procedure.
The pilot may request different procedures to those established by the AIP provided that the pilots’s procedures are approved by ATC that covers the airport in which the procedure is to be used.
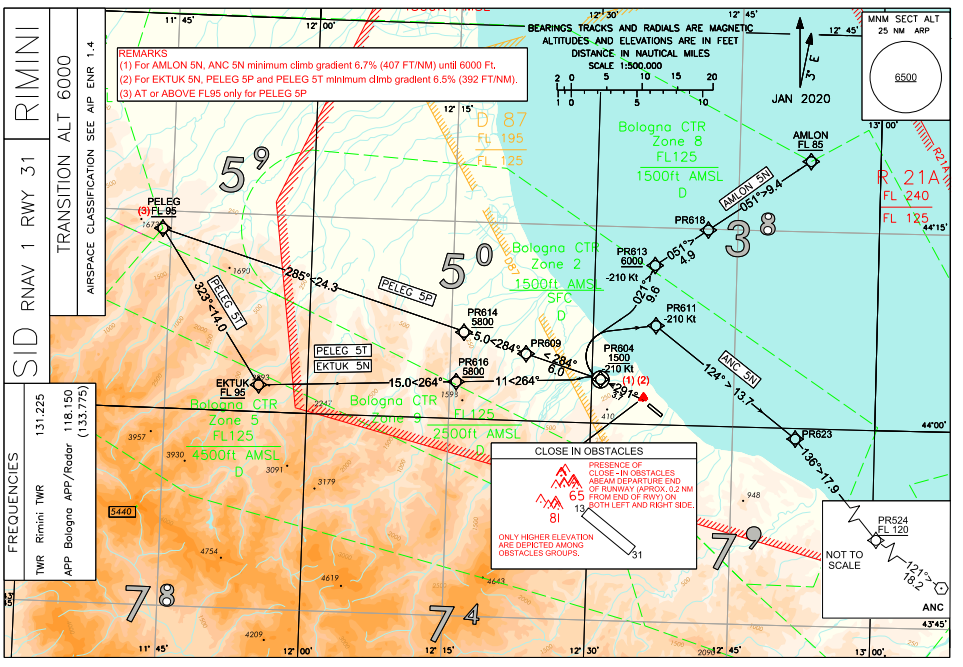
SIDs
A Standard Instrument Departure Route (SID) is a standard ATS route identified in an instrument departure procedure by which aircraft should proceed from take-off phase to the en-route phase.
The design of an instrument departure procedure is, in general, dictated by the terrain surrounding the aerodrome, but may also be required to cater for ATC requirements (adjacent ATS routes, restricted, prohibited or danger areas and the proximity of other aerodromes). These factors in turn influence the type and position of navigation aids required to provide track guidance for the departure route. Airspace restrictions may also affect the position of navigation aids. Where no suitable navigation aid is available to provide specific track guidance, the criteria for omni-directional (any direction) departures is applied. Wherever possible a straight departure will be specified, which is aligned with the runway. Coordination between TWR and APP controllers must be done.
NOTE: Obstacle clearance is a primary safety consideration in instrument departure procedures, in fact some SIDs may require a minimum climb gradient. It is the responsibility of the pilot to ensure the aircraft meets the minimum climb requirements of the SID. If the pilot is unable to comply, consider a different SID or different runway.
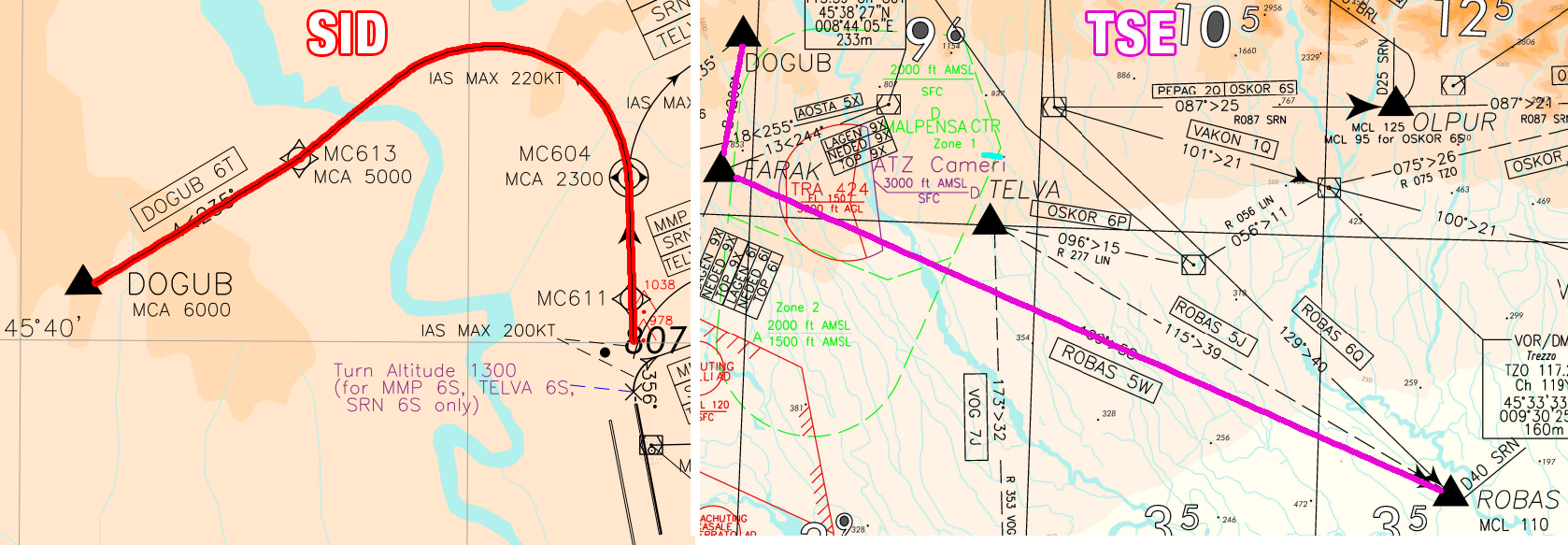
TSE (Transition)
In some major airports, to facilitate the flow of traffic there may be assigned a SID with a Transition.

This simply means that the traffic will fly via the DOGUB6T SID then after DOGUB flies via the ROBAS5W TSE.
STARs
A Standard Arrival Route (STAR) is a standard ATS route identified in an approach procedure by which aircraft should proceed from the en-route phase to an initial approach fix (IAF). An inbound traffic should be cleared for a STAR before entering the initial segment with the following phraseology:
ITY123, cleared BENUS4M arrival, expect ILSZ 12
Cleared BENUS4M arrival, expect ILSZ 12, ITY123
A STAR usually contains a holding procedure which can be over the IAF (Initial Approach Fix), which is the last point of the STAR before the approach procedure or over another point. It is recommended to instruct traffic to hold over the published holdings respecting the minimum altitudes.
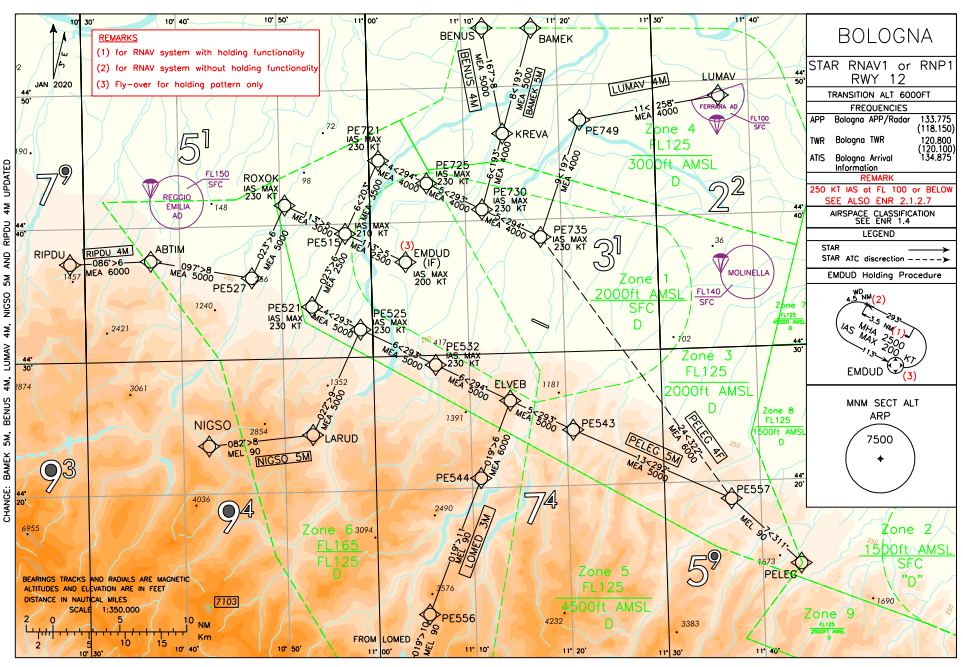
Instrumental Approach Procedures:
Whilst in many ways the problems associated with arrivals are similar to those associated with departures, the primary concern of the procedure designer will inevitably be terrain clearance until the pilot is in a position to land the aircraft once in visual contact with the underlying ground. The initial design of an instrument approach procedure is, in general, dictated by the terrain surrounding the aerodrome. It is also affected by the type of operations and the types of airplane flying the procedures. As we have already seen for departure procedures, airspace restriction may also affect the design of the procedure. We have different types of approach procedures in Italy, the main ones are: ILS, RNP and VOR.
There are 3 main types of ILS:
-
CAT 1: DH ≥ 200 ft, and RVR not less than 550 m
-
CAT 2: 200ft < DH ≥ 100 ft and RVR not less than 350 m
-
CAT 3: DH < 100 ft and RVR not less than 75 m
On VATSIM pilots are free to decide what weather conditions to use and cannot be prohibited from landing at an airport because of weather conditions
Types of turns in the approach procedure:
A procedure turn is defined as a turn from outbound to inbound in which the tracks flown are reciprocal.
Where accurate outbound track guidance can be provided by an NDB or VOR, a base turn can be specified where the inbound track is not the reciprocal of the outbound track. The specified outbound track is followed to a predetermined point at which a turn is made so that the aircraft rolls out on the required inbound track.
A racetrack consists of a turn from the inbound track through 180° at the facility or a fix after which, the outbound leg is flown to a point defined by time or a fix at which another turn through 180° is made to bring the aircraft back on to the inbound track. It is used where aircraft are required to enter a holding pattern prior to commencing the instrument procedure, and where the orientation of the holding pattern does not permit either a procedure turn or a base turn to be used. It will normally be specified as an ‘alternate procedure’ and specific instructions will be included on the plate.
Approach clearance phraseology:
ITY123, cleared ILSZ runway 12 [additional info]
Cleared ILSZ runway 12, ITY123
NOTE: Should a pilot report, or it is clear to ATC that the pilot is unfamiliar with an instrument approach procedure, ATC is responsible for describing the procedure to the pilot unless the aircraft is cleared for a straight-in approach.
Here’s a type of ILS approach procedure in Bologna
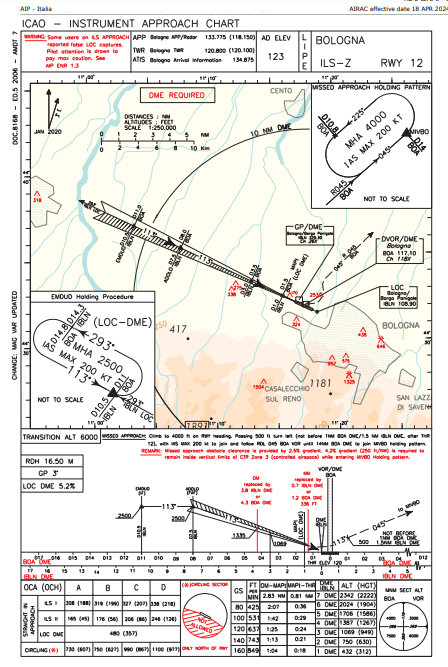
Approach Procedure Design:
An approach procedure consists of five parts or segments. These are:
-
The Arrival Segment or Route: The arrival segment begins at the point the aircraft departs from the en route airways system to begin the instrument arrival. This will normally be a radio navigation facility. If this is 25 NM or more from the aerodrome, a standard arrival route (STAR) will be specified. The STAR will route the aircraft from the en-route segment to the IAF. It is usual for aircraft to be radar vectored from a convenient point, to the final approach track.
-
The Initial Segment: In the initial segment, the aircraft is directed to a point at which the intermediate segment can be intercepted. It starts at the IAF and ends at the IF. Aircraft speed and configuration will depend upon distance from the aerodrome and any need for descent.
-
The Intermediate Segment: This is the segment in which the aircraft speed and configuration is adjusted to prepare for the final approach. Descent in this segment is kept to a minimum. It starts at the IF and ends at the FAF. If no FAF exists, it ends when the aircraft is established on the final inbound track.
-
The Final Segment: The beginning of the final segment depends upon the type of approach and the availability of a suitable FAF. In this segment, the aircraft is finally configured, alignment with the runway takes place and descent for landing is commenced.
-
The Missed Approach Segment and Procedure: In the event that the necessary visual criteria is not obtained at DA/H or MDA/H the final part of an instrument procedure permits a return to the IAF for another attempt or to establish the aircraft on a departure profile to go to another (alternate) aerodrome.
NOTE: An ATC Clearance is required for pilots to join the procedure from the IAF or IF (depending on the procedure), the same applies for pilots who want to leave the en-route segment for the STAR. If a clearance has not been received, the pilot will enter a holding pattern over the latest clearance limit.
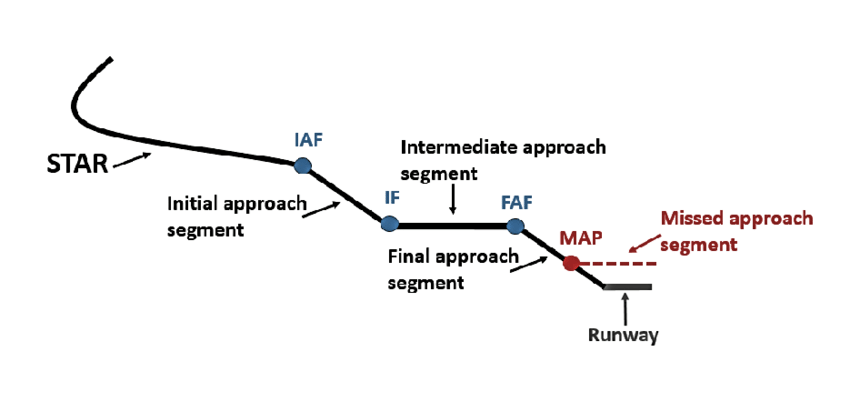
Visual Approach:
In all cases, the traffic has the option to continue the approach visually providing, of course, that it has the necessary visual criteria. Caution, this doesn’t change the flight rules to VFR! It is simply completing the IFR procedure visually. However, separation is the responsibility of ATC because there may be aircraft behind and in front of the pilot undertaking instrument approaches.
ATC shall ensure the following before handing out a visual approach clearance:
-
The traffic is inside the airspace (vertically and horizontally) of the ATC unit that hands out the clearance and,
-
Daylight, visibility greater than or equal 5km, ceiling at or above IAF assigned procedure unless they report VISUAL and,
-
The traffic must be no1 in sequence or if no2:
-
It reports the preceding traffic in sight and able to maintain separation and,
-
The preceding traffic is 8nm on final
-
The traffic must be informed about wake turbulence separation and shall separate themselves.
-
If all conditions are met, ATC may clear for the VISUAL APPROACH.
It is to be noted that in case of a missed approach, the pilot shall fly the instrument missed approach procedure.
Example of phraseology:
ITY123, request visual approach
ITY123, roger, confirm VISUAL (or VMC)?
Visual, ITY1123
ITY123, cleared for visual approach RWY 12
Minimum Altitudes for IFR traffic:
-
Minimum En-Route Altitude: The MEA is the lowest published altitude between radio fixes that ensures navigation signal coverage and meets obstacle clearance requirements between those fixes. The MEA is usually the minimum altitude for traffic flying in an airway.
-
Minimum Vectoring Altitude: MVAs are established for use by ATC when radar ATC is exercised. The MVA provides 1,000 feet of clearance above the highest obstacle in non-mountainous areas and 2,000 feet above the highest obstacle in designated mountainous areas.
Because of the ability to isolate specific obstacles, some MVAs may be lower than MEAs, MOCAs, or other minimum altitudes depicted on charts for a given location. While being radar vectored, IFR altitude assignments by ATC are normally at or above the MVA.
NOTE: A direct to a waypoint is a radar vector, it counts as a heading. Traffic being vectored must always be at or above MVA, in other words MVA is the lowest altitude that can be assigned to traffic under radar vectoring
- Minimum Holding Altitude: MHA is the lowest altitude prescribed for a holding pattern which assures navigational signal coverage, communications, and meets obstacle clearance requirements,
If a traffic is flying a procedure (not having received any directs or headings), the aircraft can be cleared to the lowest altitude as prescribed in the Approach chart or in the Arrival (STAR) Chart.
¶ 7.5 Identification
Before providing radar service to a traffic, it’s necessary to establish the identity of the observed traffic, this is done through a process called “identification”. Identification for an aircraft is achieved when at least one of the following is true:
-
the aircraft’s identification is observed in a radar label
-
The assigned squawk matches the transponder code currently in use by the aircraft
-
Squawk IDENT is observed
-
The track’s position matches the position currently being reported by the aircraft
-
The aircraft turns onto a specific heading when instructed to do so
-
The aircraft has already been identified and is being transferred to the approach controller (transfer of identification)
When identification is achieved the aircraft shall be informed with the phrase “Radar contact” or “identified”.
Approach, RYR5KB airborne, passing 2000 ft climbing to 6000 ft
RYR5KB, Approach, identified, climb to FL140
In order for positive identification to be achieved, the assigned squawk code must always match the squawk code of the aircraft
¶ 7.6 Radar minima and separation
The Approach controller deals uniquely with flying traffic, therefore the instructions in scope of this rating are mainly regarding the separation of the traffic from the ground and from each other for safety reasons.
Types of separation
HORIZONTAL
Horizontal separation is achieved by maintaining two aircrafts distance at least 5nm. In some areas there may be reduced separation:
-
3nm in LIMM TMA and LIRR TMA
-
2.5nm if succeeding traffic are established on the same final approach track within 10nm of the runway threshold [Only LIRR TMA during Independent parallel approaches]
VERTICAL
Vertical separation is achieved by maintaining two aircrafts’ vertical distance by at least 1000ft inside RVSM airspace.
Note: Higher separation minimum may be required in specific areas.
Separation from the ground
A good example regarding the importance of understanding the need to assure separation from the ground is given by the LIML airport. The radar minimum altitude chart documents that at 10nm from the north of the airfield, the radar minimum is 4000ft, and at only 20nm north of the airfield is FL105. This means that not only the traffic needs to be advised in case not respecting these minimums, but also transfer to other controllers (CTR) needs to take in account the safety and behavior of the traffic.
Loss of separation happens when the above mentioned criterias are not met. Aircrafts equipped with ACAS (Airborne Collision Avoidance System) will receive information on the possibility of a collision with another traffic in form of:
-
TA (Traffic Advisory) The pilot will report it to the ATC and await instructions
-
**RA (Resolution Advisory)**The pilot will perform an escape maneuver, overriding any given instruction from the ATC and once the conflict is resolved will communicate to the ATC that a RA was performed.
Wake Turbulence Separation:
Wake Turbulence is a dangerous phenomena that is a result of the wing tip vortices generated by an aircraft and it can lead to an undesired aircraft state.
The ICAO minima for wake turbulence separation are detailed and illustrated in PANS-ATM Doc 4444.
The distance between two aircraft on arrival or departure is used where radar separation of traffic is being applied and the time between the successive passage of two aircraft at a point is used where procedural separation applies. Since relatively few airports routinely use radar separation for take off and initial climb, the practical effect of this distinction on IFR traffic is that wake turbulence separations between arriving aircraft are based upon distance and those between departing aircraft are by time interval - at rotation, since this is where wake vortices begin.
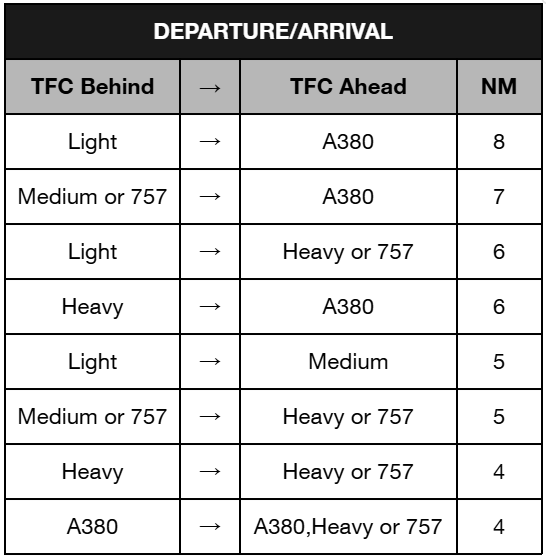
NOTE1: The separation minima described in this section are based on the aircraft categorization into 4 categories (Super, Heavy, Medium and Light).
NOTE2: For aircraft on the same LOC, ATC shall separate aircraft by applying the greater separation between the applicable wake turbulence separation minima and the applicable minimum radar separation (the larger of the two) unless a wake turbulence warning is given to the pilot, in that case ATC will apply the minimum radar separation
¶ 7.6.1 Vectoring, speed, altitude assignment and holding patterns
Vectoring:
The goal of vectoring is to have the aircraft achieve and maintain the desired track. When an aircraft is given its initial vector diverting it from a previously assigned route, the pilot must be informed about the reason for the deviation (e.g. due to traffic, for sequencing, etc.
General restrictions:
Aircraft must not be vectored closer than a half of the separation minimum (i.e. closer than 2.5 NM if the separation minimum is 5 NM) from the limit of the airspace which the controller is responsible for, unless otherwise specified in local arrangements.
Controlled flights are not to be vectored into uncontrolled airspace, except in the case of emergency or in order to circumnavigate adverse weather (in which case the pilot should be informed), or at the specific request of the pilot.
When vectoring or giving a direct route to an IFR flight takes the aircraft off an ATS route, the clearance should take into account the prescribed obstacle clearance (MVA).
After vectoring, the controller must instruct the pilot to resume own navigation, giving them the aircraft’s position if necessary or, if vectoring to final is in progress, vectoring terminates with a clearance for the approach. Vectoring is an effective method to achieve the desired distance before reaching the ILS or the boundary with the next ATS sector or unit.
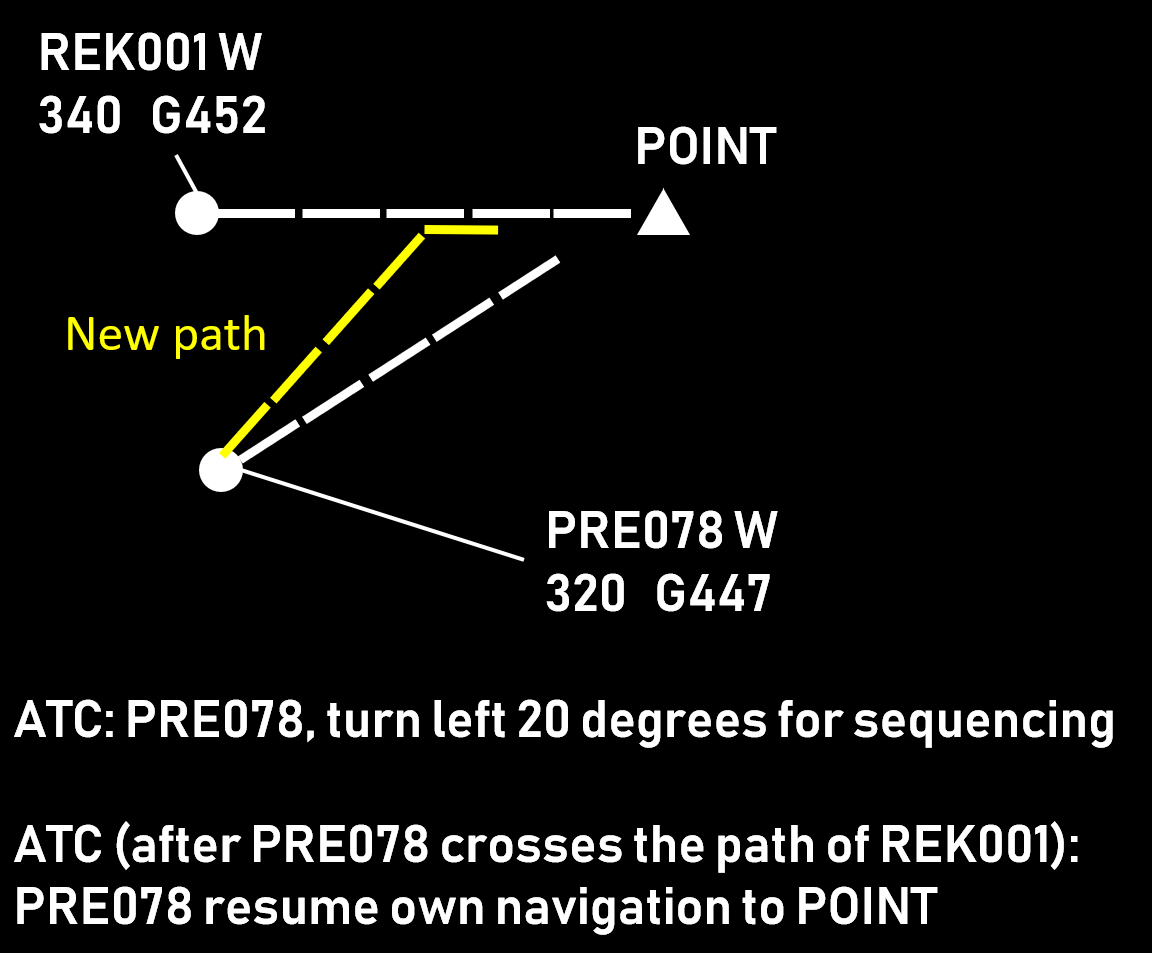
Further reading is highly suggested: Vectoring Geometry
Speed Control:
Speed control is used to facilitate a safe and orderly flow of traffic. This is achieved by instructions to adjust speed in a specified manner. Speed adjustments should be limited to those necessary to establish and/or maintain a desired separation minimum or spacing. Instructions involving frequent changes of speed, including alternate speed increases and decreases, should be avoided. Aircraft should be advised when a speed control restriction is no longer required. The flight crew should inform ATC if unable to comply with a speed instruction.
Speed adjustments should be expressed in multiples of 10 kt based on IAS. It is the controller’s task to calculate the necessary IAS that would result in the appropriate ground speed. The following factors need to be taken into account:
-
Aircraft type (range of appropriate speeds)
-
Wind speed and direction (in case the two aircraft are not on the same flight path)
-
Phase of flight (climb, cruise, descent)
-
Aircraft level (especially if the two aircraft are at different levels)
Restrictions on the use of speed control:
-
Speed control is not to be applied to aircraft in a holding pattern.
-
Only minor speed adjustments not exceeding 20 kt IAS should be used for aircraft on intermediate and final approach.
-
Speed control should not be applied to aircraft after passing 4 NM from the threshold on final approach.
NOTE: Speed restrictions must always have a beginning and an end, whenever possible specify when the restriction is lifted: “ity123 speed 160 knots until 5 miles”. Many pilots do not know that speed restrictions can not be applied below 4 miles.
When you want to cancel a speed restriction, use the following phraseology: “ITY123, no ATC speed restriction”
Suggested speeds:
-
220 or 210 KIAS on a downwind
-
180 KIAS at 10 nm from touchdown
-
160 KIAS at 5 nm from touchdown
Altitude assignment: As prescribed in “minimum altitudes for IFR traffic”
Holding Patterns:
Holding patterns are flown as a delaying tactic, be it for ATC requirements such as airspace saturation or approach delays, as the published termination of a missed approach procedure to be flown whilst coordinating further clearance, at pilot request to allow time for completion of abnormal or emergency checklist procedures or at any other time that a delay in flight progress is required. Under Instrument Flight Rules (IFR) pilots are expected to adhere to prescribed holding procedures inclusive of speed, hold entry procedures, timing and rate of turn, as the protected airspace for the holding pattern, and thus separation from other traffic, is predicated on those procedures. A holding clearance issued by ATC will include at least the following items:
-
a clearance to the holding fix
-
the direction to hold from the holding fix (if not published)
-
a specified radial, course, or inbound track (if not published)
-
if DME is used, the DME distances at which the fix end and outbound end turns are to be commenced (hold between [number of miles] and [number of miles]). If the outbound DME is not specified by ATC, pilots are expected adhere to the standard holding pattern timing procedures (if not published)
-
the altitude or FL to be maintained (above MHA)
-
the time to expect further clearance or an approach clearance or the time to leave the fix in the event of a communications failure (when able)
Holding phraseology
ITY1123, cleared to EMDUD, hold as published
Cleared to EMDUD and hold as published, ITY1123
IN CASE THE TFC IS NOT FAMILIAR WITH THE HOLD
ITY1123, cleared to EMDUD holding pattern, inbound track xxx degrees, left turn
Cleared to EMDUD holding pattern, inbound track xxx degrees, left turn, ITY1123
To learn more about holding management, this video is highly recommended
¶ 7.7 Management of Y & Z Flight Plans
Definitions: check paragraph 4.4.3
Phraseology for a Y flight plan:
Approach, ICNTY request to cancel IFR
ICNTY, roger, IFR cancelled at [TIME] [FURTHER INSTRUCTIONS]
The flight is now continued under VFR
Phraseology for a Z flight plan:
Approach, ICNTY over TZO request IFR pickup
ICNTY, roger, IFR at [TIME] [FURTHER INSTRUCTIONS]
The flight is now continued under IFR
Note1:Ensure traffic is above the minima before changing to IFR
Note2: Remember to change the flight rules in the FPL menu
¶ 7.8 Coordinations
-
Coordinate departure releases after a missed approach with the tower controller
-
Coordinate the type of approach currently in use with the CTR and the other APP controllers
-
Coordinate alternative departure routes with DEL or the airport coordinator
-
Coordinate handoffs with other sectors
-
Coordinate separation in case of LVPs
-
Coordinate the increase or reduction in separation between subsequent arrivals with tower
-
Coordinate the increase or reduction in separation between subsequent departures with tower
-
Inform the other ATCOs about any emergencies in progress
-
Coordinate with TWR or the airport coordinator for releases of departing traffic
¶ 7.9 Transfer of control
Transfer of control should happen close to the boundary of the sector and in any case before the airplane is outside the AoR.
Within the same ACC, following the transfer of control airplanes will be released:
-
If the receiving sector is adjacent
- Horizontally: for turn of maximum 20° R/L from the assigned route
- Vertically: according to the descent profile and if the aircraft has not reached PLV. If the aircraft is at PLV coordination should be started to obtain release
-
If the receiving sector is above or below
- Horizontally: for turn of maximum 20° R/L from the assigned route
- Vertically: if the aircraft has been cleared to the last level of the transferring controller’s AoR. In case of consecutive airplanes the following aircraft may be cleared to the next free level and will be released for climb once transferred.
¶ 8. Rating C1
¶ 8.1 General Information
The C1 controller has the task of working Area Control Centre (ACC) positions; such positions are indicated with “CTR” in VATSIM.
The Area controller’s job is dominated by the process of discovering and solving conflicts. By contrast, Approach and Tower controllers are mostly occupied by sequencing the traffic for taking off and landing. While it is common practice for an area controller to transfer several aircraft at the same at the same sector exit point (vertically separated), this is not an option for the tower and approach controllers when their “exit point” is the runway threshold.
Compared to their tower and approach colleagues, the area controllers do not have to communicate as much with each flight. In the simplest case, there are only two calls - the initial contact (aircraft checking in on the frequency) and the final contact (when the communication is transferred to the next sector). If no other aircraft crosses their path and the flight is in the middle of the cruise, there is no need to exchange additional messages. While these flights are monitored while in the sector, they do not contribute to the communication workload. Therefore, the area controllers are able to handle more aircraft simultaneously. The main difficulty of the C1 Rating is providing Top-Down services to all aircraft.
Enroute Controller
The Enroute (CTR) controllers are responsible for the provision of air traffic service to departing and arriving traffic in a TMA, CTR or CTA. They are the link between the Tower and Area controllers and normally serve aircraft during the climb, descent and approach phases. Unlike the Tower and APP controllers, the Enroute controller may serve several airports within a large range and they work with traffic overflying, departing and arriving.
The Enroute controller shall:
-
Be conscious of his area of responsibility
-
Provide top down if the local controller is offline.
-
Identify an aircraft correctly.
-
Understand horizontal and vertical airspace boundaries.
-
Issues appropriate descent clearances.
-
Issue STAR and approach clearances using prescribed phraseology.
-
Adjust aircraft speed, heading, and altitude as needed to achieve required separation and to optimize the sequence.
-
Apply separation minima as required.
-
Demonstrate an understanding of the different types of approaches.
-
Issue holding instructions using prescribed phraseology if required.
-
Correctly transfer radar tag ownership and communication to the next controller.
-
Correctly transfers the traffic to the next controller according to the Letter of Agreements [LoA].
¶ 8.2 Normal Flow Of Operations
During normal operations the area controller follows a routine comprising several consecutive actions:
-
Scan the airspace and search for situations (e.g. conflicts, aircraft deviations, complex situations, etc.). This is done by constantly shifting the focus from one aircraft to the next. The time spent on each aircraft during each scan is usually within a second or two but this can increase substantially if necessary. The process is often interrupted by coordinations, aircraft transmissions, etc. but after these are handled, it restarts. While there are no strict rules about how often aircraft need to be looked at (or regarding the time spent per aircraft), the controllers try not to have an aircraft “unattended to” for more than a minute (the period is usually shorter).
-
Develop a plan to solve the situations. When a situation is found, the controller starts working on an appropriate solution. Examples of situations that require a plan to be developed include (the list is not exhaustive): If a potential conflict is found, then the situation is further examined to determine the distance between aircraft at their closest point of approach. If this distance is not considered sufficient (i.e. greater than the applicable separation minimum plus some small buffer to account for various uncertainties) and vertical separation cannot be currently assured, then a plan for solving the conflict is created. Examples of such plans are:
-
When aircraft A reaches point X, an instruction to descent will be issued.
-
A direct flight will be coordinated with the next sector and the speeds of the two aircraft will be adjusted.
-
Knowing that aircraft A requests to climb above aircraft B and that the two aircraftare diverging after point X, an initial climb clearance will be issued to a level 1000 ftbelow aircraft B. When the aircraft diverge and are safely separated, a clearance tothe requested level will be issued.
-
Aircraft A (which will need to descend under aircraft B that is 2000 feet below due to reaching its top-of-descent point) will be vectored 15 degrees to the right. When the separation is enough, a descent clearance will be issued. Then, aircraft A will be vectored again so that it flies on a parallel heading with aircraft B (this is done for efficiency reasons). After aircraft A has descended below aircraft B, it will be instructed to resume own navigation to the sector exit point.
-
If an aircraft is flying towards a special use area (e.g. a danger area or a temporary reserved area), the controller develops an appropriate solution, e.g. “Firstly, I will ask the crew if they are able to climb above the area. If that is not possible, I will vector the aircraft around it. If for some reason (e.g. weather) this is not possible, I will coordinate passage through that area.”
-
If a deviation from a clearance is observed or indicated by the system, the controller determines the reason and proceeds accordingly.
-
Execute the plan. This phase often coincides (at least partly) with the previous one and consists of issuing appropriate clearances and instructions.
-
The Scan >> Plan >> Execute loop is repeated until the controller hands over their position.
¶ 8.3 Area Control Centre - Detection of conflicts
Detecting conflicts between aircraft is an important part of the air traffic controller job and arguably the most complex one. Once a conflict is properly identified the resolution is relatively straightforward - the controller chooses an appropriate method (e.g. level change, vectoring, speed control, etc.), implements the plan and monitors aircraft compliance. If the situation remains undetected, however, this may result in loss of separation, late (and more abrupt) maneuvers, STCA/TCAS activation or worse.
If all aircraft are assigned different levels, and are not expected to climb or descend, then there are no conflicts. Most commercial operations however take place in the RVSM layer which means that this situation is unlikely. Therefore, normally the first thing to be done in a surveillance environment, is a “same level scan”, i.e. looking for aircraft that are maintaining the same level. This initial step identifies aircraft that need further examination. The second phase is to discard the pairs that are “obviously” non-conflicting, e.g. flying at the same speed to the same point with long distance between them, those whose paths do not cross, etc. After that, the minimum distance of the “suspicious” pairs is determined and, if necessary, a plan for solving the conflict is created.
Climbing and descending flights present a special challenge as they require more checks to be done, e.g.:
-
Does the current level cause conflicts?
-
Will the final level for the sector cause a conflict (within the sector or at the exit point)?
-
Will any of the intermediate levels cause a conflict within the sector?
-
Will the aircraft be able to reach its planned level before the exit point? If not, will this cause a conflict in the next sector?
These checks may become more complex if the aircraft climbs or descends through a high number of flight levels (e.g. climbing from FL 140 up to FL 360). This results in significant change in groundspeed (due to wind and IAS variations) which hinders precise calculations. The effect may be mitigated by Euroscope support tools (Topsky) and controllers are often able to make reasonably precise estimates based on experience. Nevertheless, such situations require much more attention than aircraft in level flight. Tools that help the C1
Controller in detecting conflicts are:
-
Topsky CARD
-
Euroscope Separation Tool
-
Euroscope Flight Plan Separation Tool
-
Distance Tool
-
Topsky Probe
¶ 8.4 Descent Planning
When it comes to descending and calculating the top of descent (TOD) for each aircraft, thorough planning is crucial. You’ll need to compare the current altitude of the airplane with the descent profile to determine the necessary altitude to maintain the standard 3° glide path. As an ACC controller, mastering this aspect of controlling iis essential for quick and efficient operations.
Here are some useful rules of thumb to guide you:
-
300 feet per 1 nautical mile (NM) - Pilots should aim to descend 300 feet in altitude for every 1 NM in distance to maintain a 3° glide path.
-
Altitude difference divided by 1000, multiplied by 3 - To determine the distance in NM that pilots will cover during descent, take the aircraft’s altitude (in feet), divide it by 1000, and then multiply the result by 3.
Understanding and applying these rules will greatly contribute to effective and safe aircraft descents.
¶ 8.5 Sequencing of traffic
The ACC Controller normally sequences traffic by putting an aircraft every 10-15 nm and releasing it to the next sector at the appropriate COOP. The first step for the perfect sequence is identifying who will go first and who will go second, we suggest the usage of time estimates over a given waypoint for this purpose. Once the order of the sequence has been established, the controller shall look at the aircraft in order to find if there are possible conflicts or if the aircraft will reach the COOP with a distance of less than what is required. When such a situation is detected, the controller needs to choose an appropriate method (or a combination of methods) to solve it. These include:
-
Level changei.e. assigning different levels to the conflicting aircraft. It should be noted though that conflict-free levels are not always available, aircraft are often unable to climb (being at their cruising level) and descending leads to flight inefficiency.
-
Vectoring
-
Direct routingThis has a similar effect to vectoring. It reduces the miles flown which sometimes (but not always) benefits flight efficiency. The applicability of this technique is restricted by the points in the flight planned route and the growing implementation of free route airspace which allows planning the route with fewer and softer turns.
-
Speed controlIn Italy, as a general rule of thumb, above FL245 we assign speed restrictions in Mach number, below FL245 we assign speeds in KIAS, use of “on conversion” is also highly suggested.
-
Vertical speed controlapplicable when at least one of the aircraft is climbing or descending through the other’s level
The choice of technique depends on the situation (conflict geometry, wind direction, aircraft types, etc.) so there is no universal solution. A combination of techniques can be used, for example:
-
vectoring followed by a direct routing
-
vectoring or direct routing augmented by speed control
-
vectoring climbing or descending aircraft (to provide continuous climb or descent) combined with vertical speed assignment (to quickly cross the conflicting level so that own navigation can be resumed earlier)
¶ 8.6 General Rules of thumb on the VATSIM Network
-
When working a vertically split configuration (Lower sector+upper), the upper sector shall make traffic descent earlier in order for the aircraft to maintain a good descent profile due to the delay in frequency changes
-
Always remember the top down principles and the priority of messages (landing/takeoff clearances first then airborne traffic, then traffic on the ground and finally clearances, you may deviate from this standard for operational reasons however this guideline provides a good rule of thumb)
-
If there is a lot of traffic and the sector is being saturated, you may refuse to perform top down services
-
You can provide clearances for pilot via text by using the “.clr” Alias
-
The TAG must ALWAYS be correctly updated in order for the next controller to know what you’re doing
-
Knowing all the airports and airspaces is imperative in order for a good service to be provided
¶ 8.7 CPDLC
CPDLC, or Controller-Pilot Data Link Communications, is a method used for digital communication between air traffic controllers and pilots. It allows for more efficient and precise communication, especially in areas with heavy air traffic or where voice communication may be challenging.
Setup
On VATSIM the CPDLC infrastructure is based on Hoppie’s ACARS simulation. In
order to use CPDLC communications a unique code (Hoppie registration -
https://www.hoppie.nl/acars/system/register.html and Topsky are required).
Log-on Procedure
An aircraft can send a log-on notification (establish connection with ATC entity) at any time. If possible the connection request is established already on the ground or preferably when passing 10’000ft/FL100 as an additional item. A successful connection does not imply CPDLC communication is already in use. Every country has a defined area (vertical and horizontal) and a list of instructions that can be exchanged via CPDLC. Details for Italian operations in the following table.
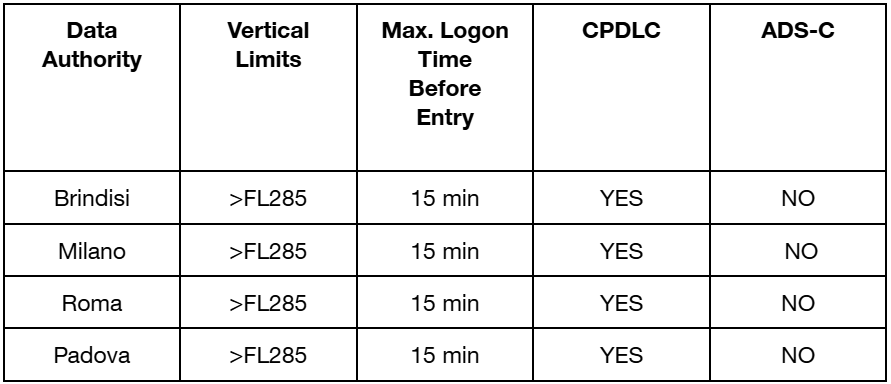
This means an aircraft departing from the Milano FIR can send a log-on notification when still at the gate or passing FL100 but requests and instructions via CPDLC will be available only when above FL285.
Operating Guidelines
-
CPDLC does NOT substitute voice communication and an active watch of the tuned frequency is required at ALL times.
-
Clearances received by CPDLC should be replied to via CPDLC.
-
Clearances must not be actioned until the WILCO response is received by ATC.
-
Do not send multiple requests in the same message.
-
Transfer between ATC CENTRES: 1. Select WILCO and send a response to the message with the new frequency; 2. Tune new frequency; 3. Contact ATC by voice.
-
Whether or not CPDLC connection has been established, the first contact with a new ATC unit requires a voice communication.
-
There is no requirement to state “CPDLC” in the radio contact (when a pilot logs on above min FL, simply start to send instructions via CPDLC, there is no need to say “CPDLC” or “CPDLC request received” or any type of weird phraseology)
-
If there is any doubt regarding a clearance, revert to voice.
¶ 8.8 Coordinations
-
Coordinate with nearby enroute controllers constantly in case of a deviation from LoAs
-
Coordinate the type of approach currently in use with the APP and if needed authorizes the traffic to the STAR (STAR is always assigned by the lowest ACC sector, type of approach is assigned by the APP controller unless coordinated)
-
Coordinate alternative departure routes with APP or the airport coordinator
-
Coordinate handoffs with other sectors
-
Coordinate separation in case of LVPs
-
Coordinate the increase or reduction in separation between subsequent arrivals with APP
-
Inform the other ATCOs about any emergencies in progress
¶ 8.9 Transfer of control
Transfer of control should happen close to the boundary of the sector and in any case before the airplane is outside the AoR.
Within the same ACC, following the transfer of control airplanes will be released:
-
If the receiving sector is adjacent
- Horizontally: for turn of maximum 20° R/L from the assigned route
- Vertically: according to the descent profile and if the aircraft has not reached PLV. If the aircraft is at PLV coordination should be started to obtain release
-
If the receiving sector is above or below
- Horizontally: for turn of maximum 20° R/L from the assigned route
- Vertically: if the aircraft has been cleared to the last level of the transferring controller’s AoR. In case of consecutive airplanes the following aircraft may be cleared to the next free level and will be released for climb once transferred.